Department of Connectomics, Max Planck Institute for Brain Research, Frankfurt, Germany.
Faculty of Science, Radboud University, Nijmegen, the Netherlands.
Nat Methods. 2024 May;21(5):908-913. doi: 10.1038/s41592-024-02226-5. Epub 2024 Mar 21.
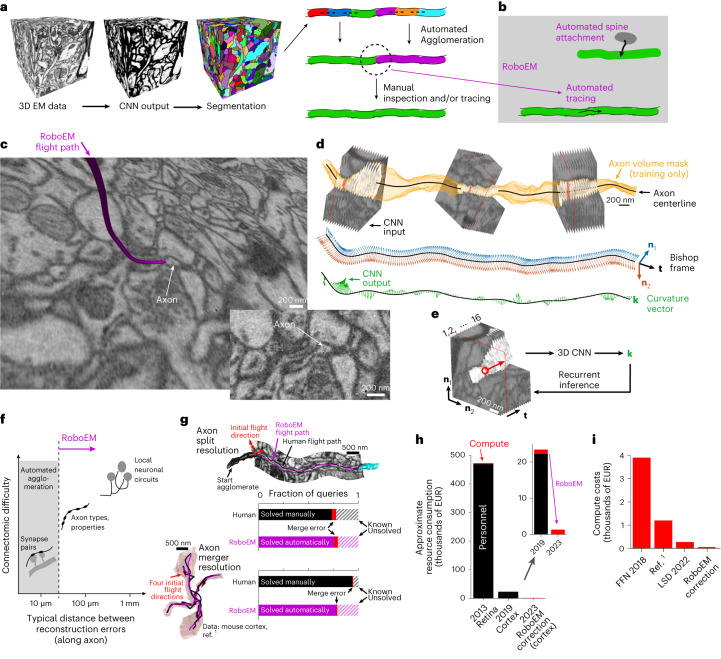
Mapping neuronal networks from three-dimensional electron microscopy (3D-EM) data still poses substantial reconstruction challenges, in particular for thin axons. Currently available automated image segmentation methods require manual proofreading for many types of connectomic analysis. Here we introduce RoboEM, an artificial intelligence-based self-steering 3D 'flight' system trained to navigate along neurites using only 3D-EM data as input. Applied to 3D-EM data from mouse and human cortex, RoboEM substantially improves automated state-of-the-art segmentations and can replace manual proofreading for more complex connectomic analysis problems, yielding computational annotation cost for cortical connectomes about 400-fold lower than the cost of manual error correction.
从三维电子显微镜 (3D-EM) 数据中绘制神经元网络仍然存在重大的重建挑战,特别是对于薄轴突而言。目前可用的自动化图像分割方法需要人工校对,以进行许多类型的连接组学分析。在这里,我们介绍了 RoboEM,这是一种基于人工智能的自主 3D“飞行”系统,它仅使用 3D-EM 数据作为输入,经过训练可沿着神经突导航。将 RoboEM 应用于来自小鼠和人类皮层的 3D-EM 数据,可大大改进自动化的最先进分割,并可替代更复杂的连接组学分析问题的人工校对,从而使皮层连接组的计算注释成本比手动纠错的成本低约 400 倍。