Unité de Formation et de Recherche en Sciences et Techniques des Activités Physiques et Sportives, Université de Bourgogne, Dijon, France.
PLoS One. 2012;7(9):e44291. doi: 10.1371/journal.pone.0044291. Epub 2012 Sep 12.
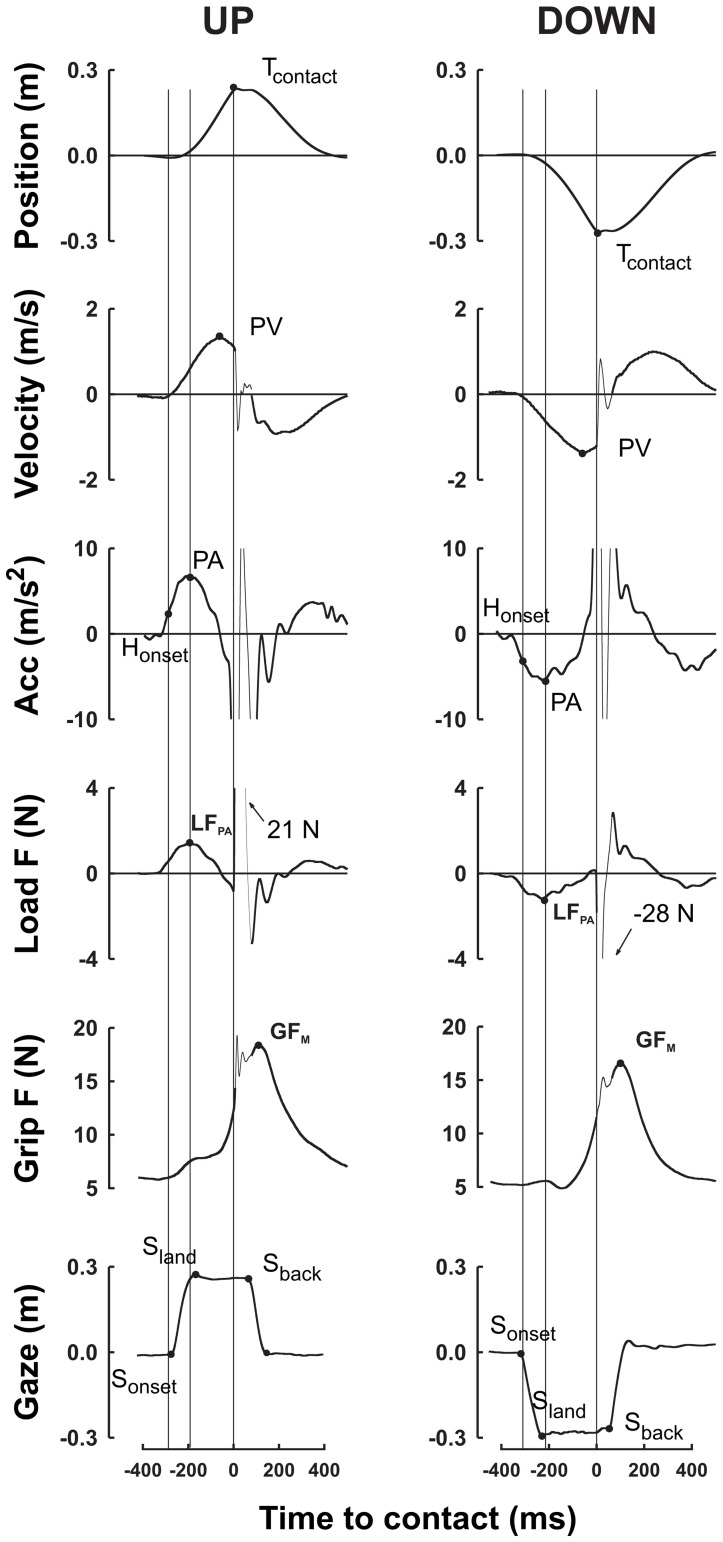
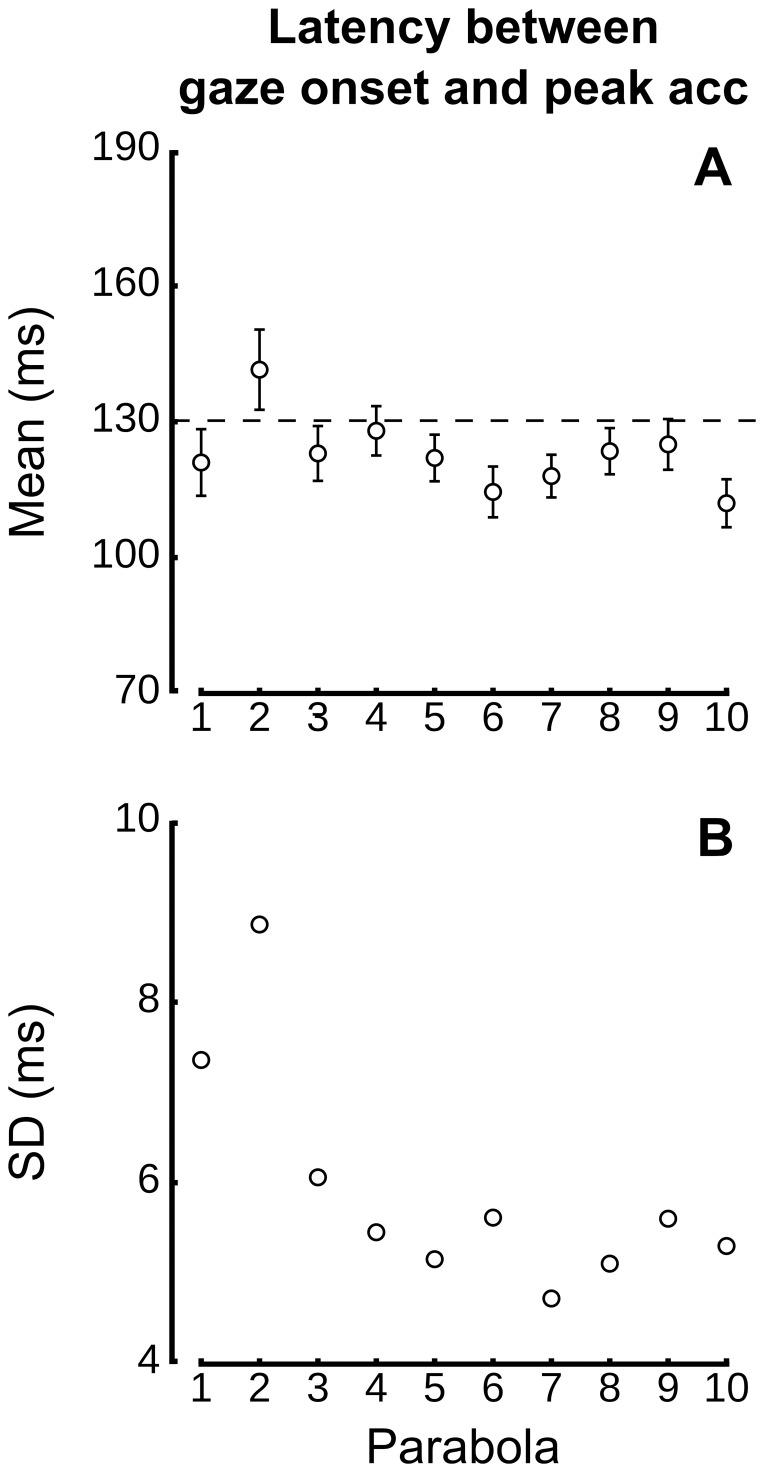
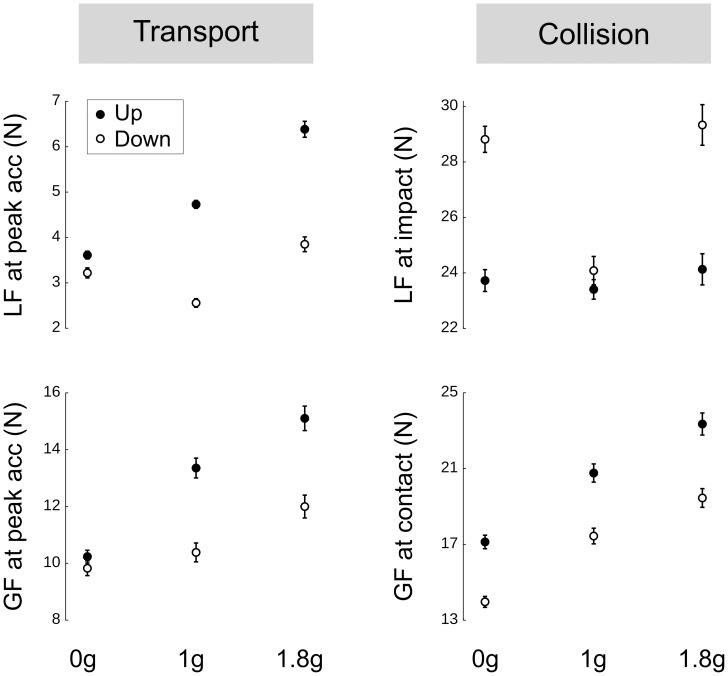
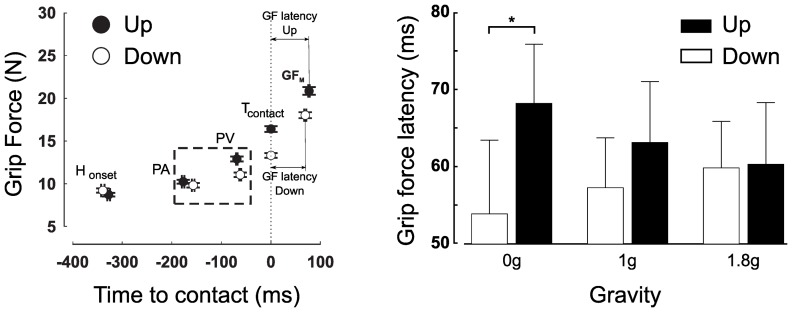
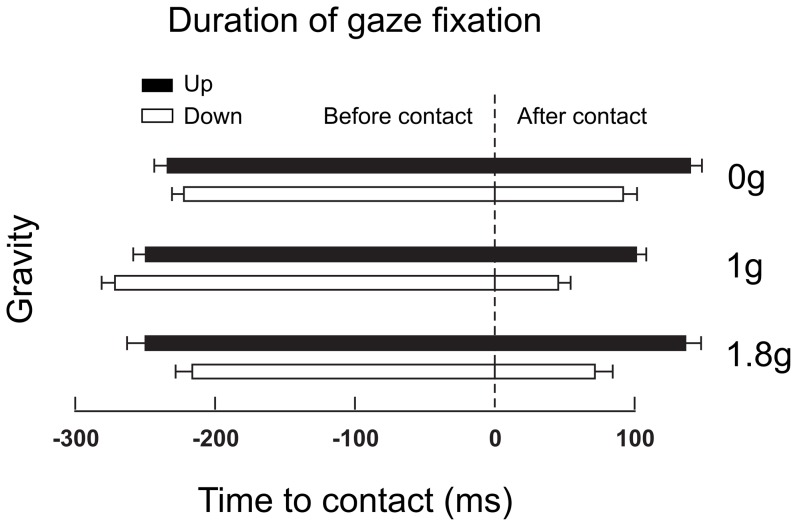
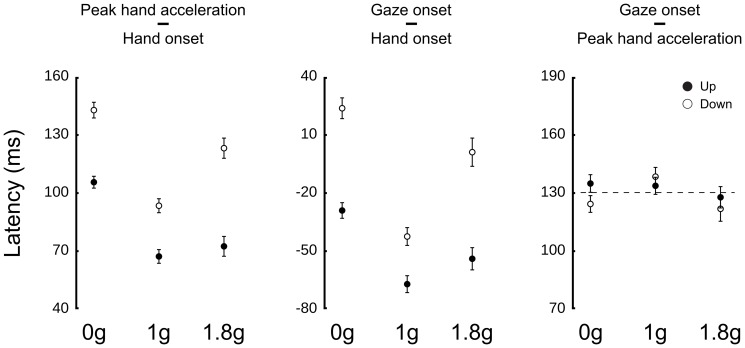
Most object manipulation tasks involve a series of actions demarcated by mechanical contact events, and gaze is usually directed to the locations of these events as the task unfolds. Typically, gaze foveates the target 200 ms in advance of the contact. This strategy improves manual accuracy through visual feedback and the use of gaze-related signals to guide the hand/object. Many studies have investigated eye-hand coordination in experimental and natural tasks; most of them highlighted a strong link between eye movements and hand or object kinematics. In this experiment, we analyzed gaze strategies in a collision task but in a very challenging dynamical context. Participants performed collisions while they were exposed to alternating episodes of microgravity, hypergravity and normal gravity. First, by isolating the effects of inertia in microgravity, we found that peak hand acceleration marked the transition between two modes of grip force control. Participants exerted grip forces that paralleled load force profiles, and then increased grip up to a maximum shifted after the collision. Second, we found that the oculomotor strategy adapted visual feedback of the controlled object around the collision, as demonstrated by longer durations of fixation after collision in new gravitational environments. Finally, despite large variability of arm dynamics in altered gravity, we found that saccades were remarkably time-locked to the peak hand acceleration in all conditions. In conclusion, altered gravity allowed light to be shed on predictive mechanisms used by the central nervous system to coordinate gaze, hand and grip motor actions during a mixed task that involved transport of an object and high impact loads.
大多数物体操纵任务都涉及一系列由机械接触事件标记的动作,并且在任务展开时,视线通常会指向这些事件的位置。通常,视线会在接触前 200 毫秒注视目标。这种策略通过视觉反馈和使用与注视相关的信号来引导手/物体,从而提高手动精度。许多研究已经在实验和自然任务中研究了眼手协调;其中大多数强调了眼动和手或物体运动学之间的紧密联系。在这个实验中,我们在碰撞任务中分析了注视策略,但在非常具有挑战性的动力学环境中。参与者在经历微重力、超重和正常重力的交替阶段时进行碰撞。首先,通过隔离微重力中的惯性影响,我们发现手的峰值加速度标志着两种抓握力控制模式之间的转变。参与者施加的握力与负载力曲线平行,然后在碰撞后增加握力,达到最大后再移位。其次,我们发现眼动策略适应了受控制物体在碰撞后的视觉反馈,因为在新的重力环境中,碰撞后的注视时间延长了。最后,尽管在改变的重力下手臂动力学的变化很大,但我们发现,在所有条件下,眼跳都与手的峰值加速度非常吻合。总之,改变的重力使我们能够揭示中枢神经系统在协调注视、手和抓握运动动作时使用的预测机制,这些机制在涉及物体运输和高冲击载荷的混合任务中。