Louie Dennis R, Eng Janice J
Graduate Program in Rehabilitation Sciences, University of British Columbia, Vancouver, BC, Canada.
Rehabilitation Research Program, Vancouver Coastal Health Research Institute, Vancouver, BC, Canada.
J Neuroeng Rehabil. 2016 Jun 8;13(1):53. doi: 10.1186/s12984-016-0162-5.
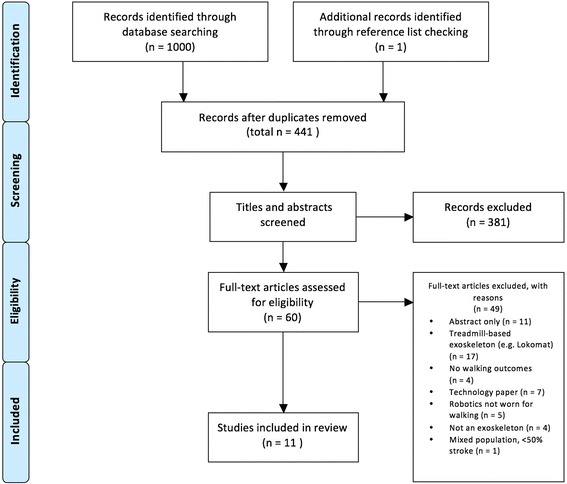
Powered robotic exoskeletons are a potential intervention for gait rehabilitation in stroke to enable repetitive walking practice to maximize neural recovery. As this is a relatively new technology for stroke, a scoping review can help guide current research and propose recommendations for advancing the research development. The aim of this scoping review was to map the current literature surrounding the use of robotic exoskeletons for gait rehabilitation in adults post-stroke. Five databases (Pubmed, OVID MEDLINE, CINAHL, Embase, Cochrane Central Register of Clinical Trials) were searched for articles from inception to October 2015. Reference lists of included articles were reviewed to identify additional studies. Articles were included if they utilized a robotic exoskeleton as a gait training intervention for adult stroke survivors and reported walking outcome measures. Of 441 records identified, 11 studies, all published within the last five years, involving 216 participants met the inclusion criteria. The study designs ranged from pre-post clinical studies (n = 7) to controlled trials (n = 4); five of the studies utilized a robotic exoskeleton device unilaterally, while six used a bilateral design. Participants ranged from sub-acute (<7 weeks) to chronic (>6 months) stroke. Training periods ranged from single-session to 8-week interventions. Main walking outcome measures were gait speed, Timed Up and Go, 6-min Walk Test, and the Functional Ambulation Category. Meaningful improvement with exoskeleton-based gait training was more apparent in sub-acute stroke compared to chronic stroke. Two of the four controlled trials showed no greater improvement in any walking outcomes compared to a control group in chronic stroke. In conclusion, clinical trials demonstrate that powered robotic exoskeletons can be used safely as a gait training intervention for stroke. Preliminary findings suggest that exoskeletal gait training is equivalent to traditional therapy for chronic stroke patients, while sub-acute patients may experience added benefit from exoskeletal gait training. Efforts should be invested in designing rigorous, appropriately powered controlled trials before powered exoskeletons can be translated into a clinical tool for gait rehabilitation post-stroke.
动力机器人外骨骼是中风后步态康复的一种潜在干预手段,可实现重复性步行练习,以最大限度地促进神经恢复。由于这是一项针对中风的相对较新的技术,范围综述有助于指导当前的研究,并为推进研究发展提出建议。本范围综述的目的是梳理围绕使用机器人外骨骼进行中风后成人步态康复的当前文献。检索了五个数据库(PubMed、OVID MEDLINE、CINAHL、Embase、Cochrane临床试验中央注册库),以查找从数据库建立到2015年10月的文章。对纳入文章的参考文献列表进行了审查,以识别其他研究。如果文章将机器人外骨骼用作成人中风幸存者的步态训练干预手段,并报告了步行结果测量指标,则将其纳入。在识别出的441条记录中,11项研究(均在过去五年内发表)涉及216名参与者,符合纳入标准。研究设计从前后对照临床研究(n = 7)到对照试验(n = 4);其中五项研究单侧使用机器人外骨骼设备,六项使用双侧设计。参与者从中风亚急性期(<7周)到慢性期(>6个月)不等。训练期从单次训练到为期8周的干预。主要的步行结果测量指标是步态速度、计时起立行走测试、6分钟步行测试和功能性步行分类。与慢性中风相比,基于外骨骼的步态训练在亚急性中风中更明显地带来了有意义的改善。四项对照试验中的两项显示,与慢性中风对照组相比,任何步行结果均未出现更大改善。总之,临床试验表明,动力机器人外骨骼可安全用作中风后的步态训练干预手段。初步研究结果表明,外骨骼步态训练对慢性中风患者等同于传统疗法,而亚急性患者可能从外骨骼步态训练中获得额外益处。在将动力外骨骼转化为中风后步态康复的临床工具之前,应投入精力设计严格且有足够效力的对照试验。