Department of Biomedical Engineering, University of Michigan, Ann Arbor, MI, United States of America.
J Neural Eng. 2017 Dec;14(6):066004. doi: 10.1088/1741-2552/aa80bd.
Intracortical brain-machine interfaces (BMIs) are a promising source of prosthesis control signals for individuals with severe motor disabilities. Previous BMI studies have primarily focused on predicting and controlling whole-arm movements; precise control of hand kinematics, however, has not been fully demonstrated. Here, we investigate the continuous decoding of precise finger movements in rhesus macaques.
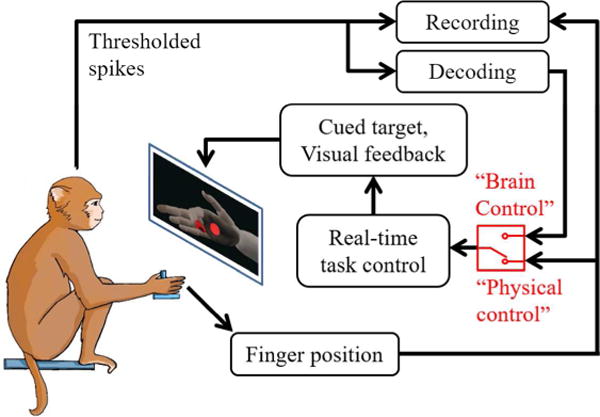
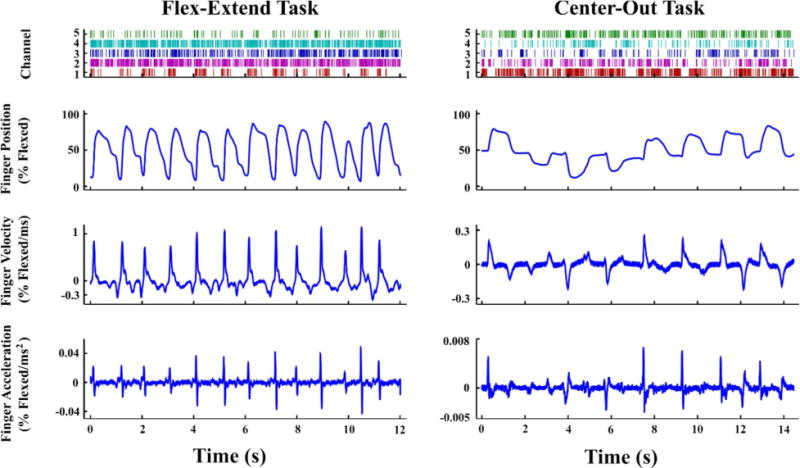
In order to elicit precise and repeatable finger movements, we have developed a novel behavioral task paradigm which requires the subject to acquire virtual fingertip position targets. In the physical control condition, four rhesus macaques performed this task by moving all four fingers together in order to acquire a single target. This movement was equivalent to controlling the aperture of a power grasp. During this task performance, we recorded neural spikes from intracortical electrode arrays in primary motor cortex.
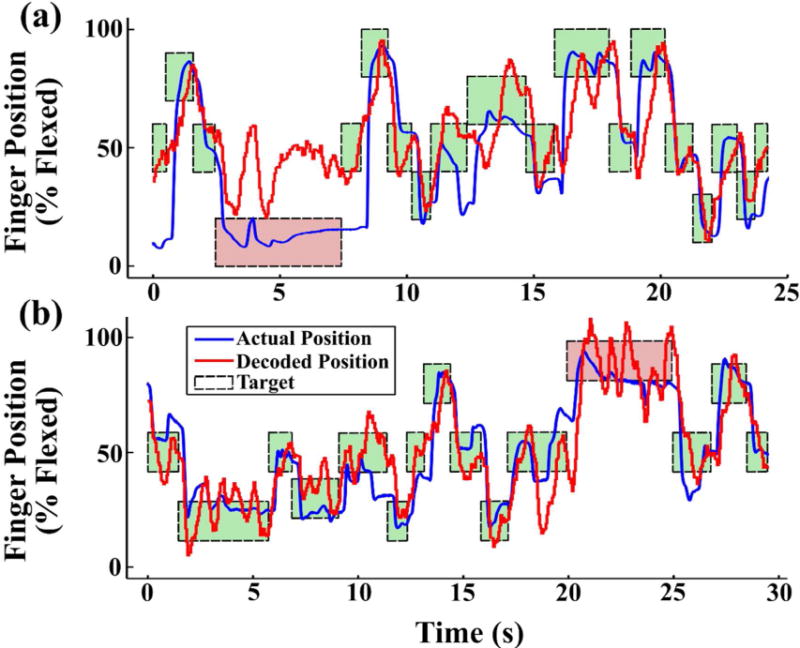
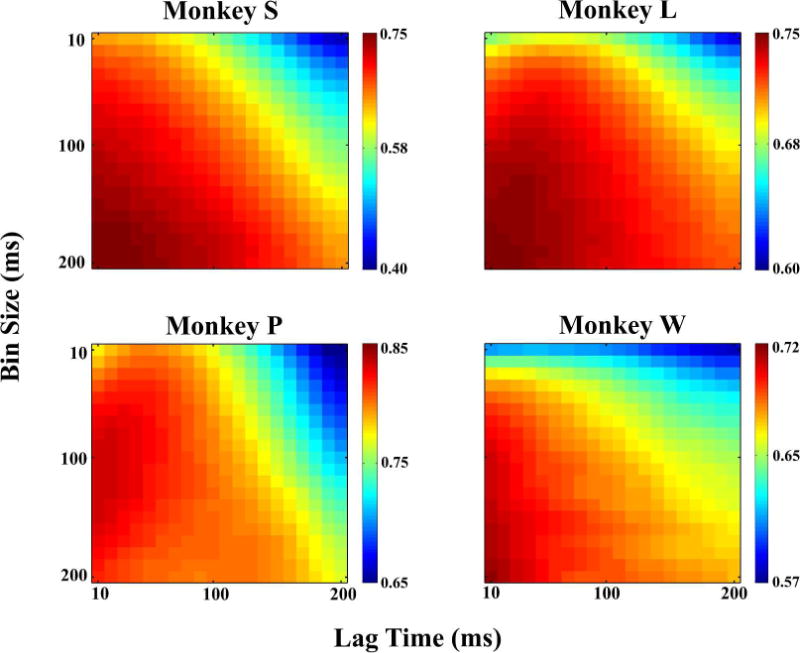
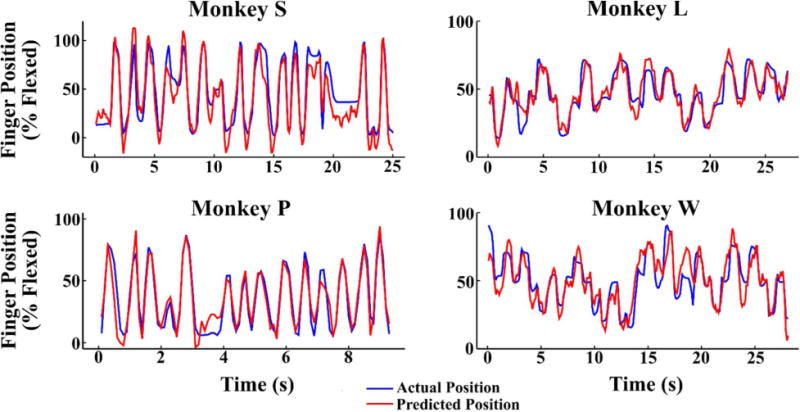
Using a standard Kalman filter, we could reconstruct continuous finger movement offline with an average correlation of ρ = 0.78 between actual and predicted position across four rhesus macaques. For two of the monkeys, this movement prediction was performed in real-time to enable direct brain control of the virtual hand. Compared to physical control, neural control performance was slightly degraded; however, the monkeys were still able to successfully perform the task with an average target acquisition rate of 83.1%. The monkeys' ability to arbitrarily specify fingertip position was also quantified using an information throughput metric. During brain control task performance, the monkeys achieved an average 1.01 bits s throughput, similar to that achieved in previous studies which decoded upper-arm movements to control computer cursors using a standard Kalman filter.
This is, to our knowledge, the first demonstration of brain control of finger-level fine motor skills. We believe that these results represent an important step towards full and dexterous control of neural prosthetic devices.
皮质内脑机接口(BMI)是严重运动障碍患者假体控制信号的有前途的来源。以前的 BMI 研究主要集中在预测和控制整个手臂运动;然而,手运动学的精确控制尚未得到充分证明。在这里,我们研究了恒河猴精确手指运动的连续解码。
为了引出精确和可重复的手指运动,我们开发了一种新的行为任务范式,要求受试者获取虚拟指尖位置目标。在物理控制条件下,四只恒河猴通过一起移动所有四个手指来执行此任务,以获取单个目标。这种运动相当于控制力抓握的开口。在此任务执行过程中,我们记录了来自初级运动皮层内皮质电极阵列的神经尖峰。
使用标准卡尔曼滤波器,我们可以离线重建连续手指运动,四个恒河猴的平均相关系数ρ为 0.78。对于其中两只猴子,这种运动预测是实时进行的,以便直接用大脑控制虚拟手。与物理控制相比,神经控制性能略有下降;然而,猴子仍然能够成功地以 83.1%的平均目标获取率完成任务。通过信息吞吐量指标还量化了猴子任意指定指尖位置的能力。在大脑控制任务执行期间,猴子的平均吞吐量为 1.01 位 s,与使用标准卡尔曼滤波器解码上臂运动以控制计算机光标并在之前的研究中获得的吞吐量相似。
据我们所知,这是大脑控制手指级精细运动技能的首次演示。我们相信,这些结果代表着朝着完全灵活的神经假体控制迈出的重要一步。