Ballardini Giulia, Carlini Giorgio, Giannoni Psiche, Scheidt Robert A, Nisky Ilana, Casadio Maura
Department of Informatics, Bioengineering, Robotics and Systems Engineering, University of Genoa, Genoa, Italy.
Marquette University and the Medical College of Wisconsin, Milwaukee, WI, United States.
Front Neurorobot. 2018 Apr 6;12:12. doi: 10.3389/fnbot.2018.00012. eCollection 2018.
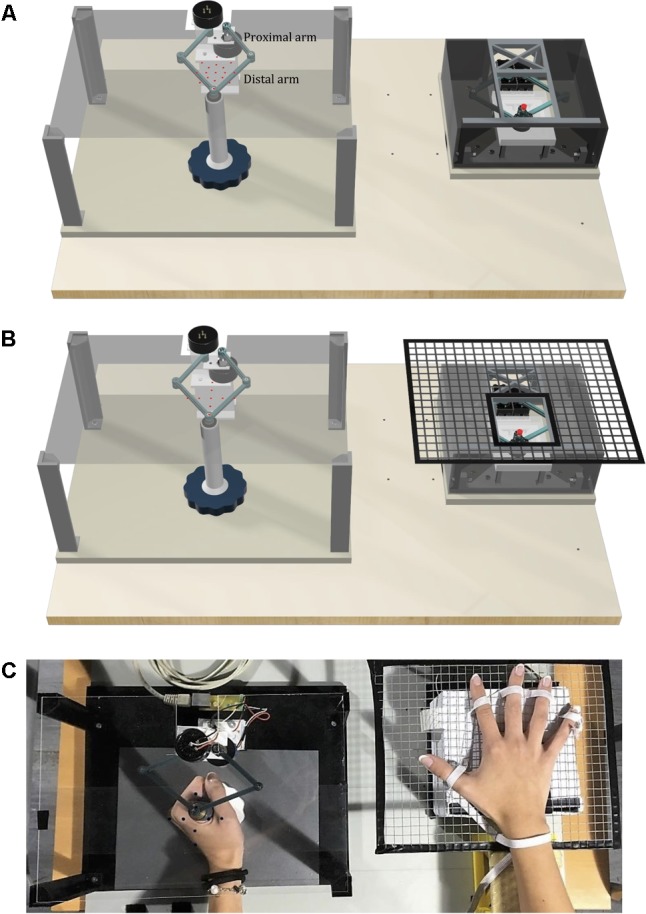
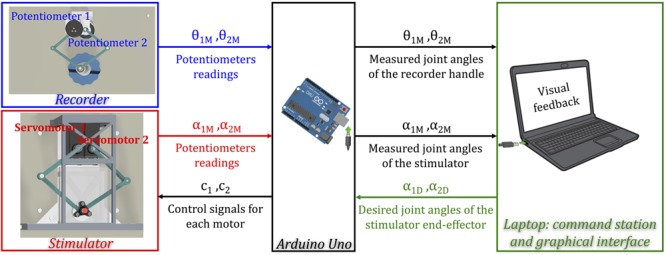
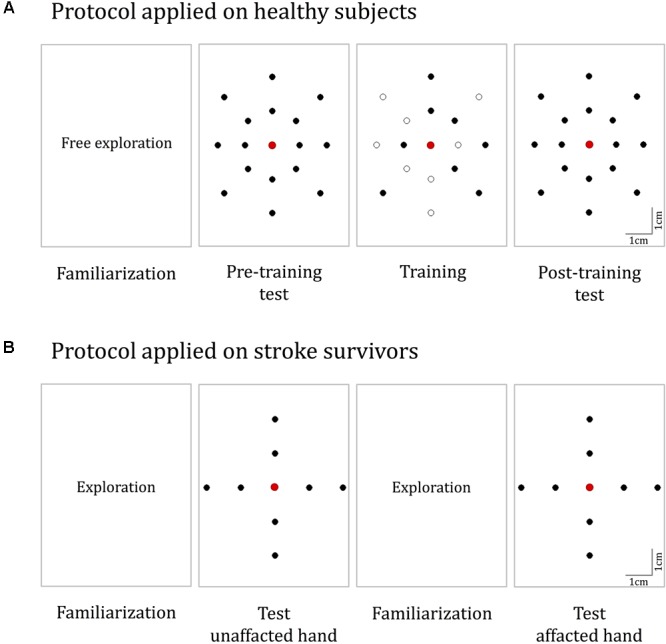
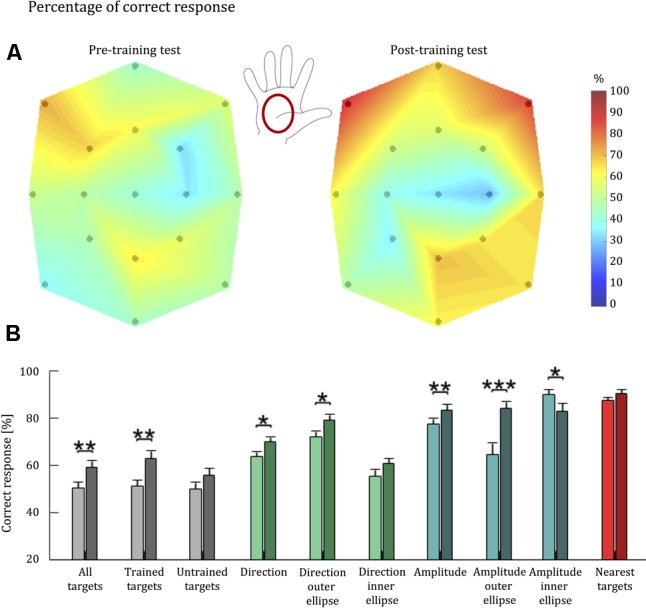
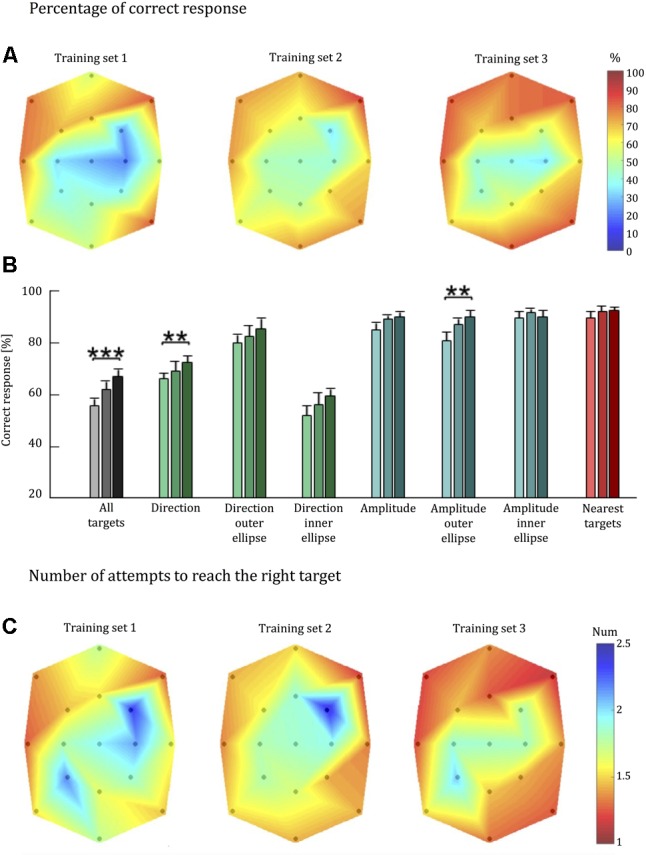
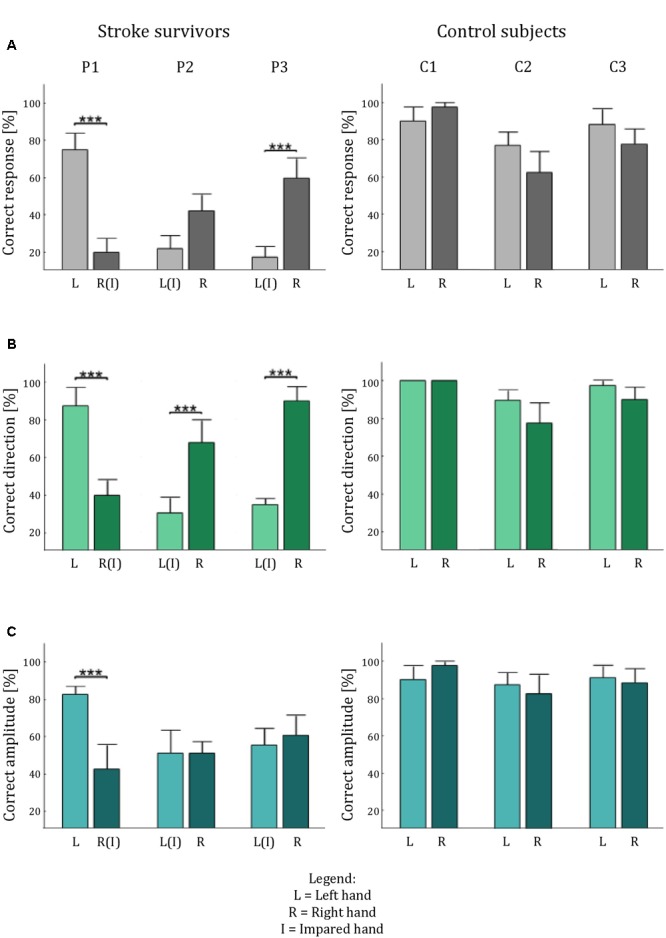
Many neurological diseases impair the motor and somatosensory systems. While several different technologies are used in clinical practice to assess and improve motor functions, somatosensation is evaluated subjectively with qualitative clinical scales. Treatment of somatosensory deficits has received limited attention. To bridge the gap between the assessment and training of motor vs. somatosensory abilities, we designed, developed, and tested a novel, low-cost, two-component (bimanual) mechatronic system targeting tactile somatosensation: the -a tactile stimulator and recorder. The stimulator is an actuated pantograph structure driven by two servomotors, with an end-effector covered by a rubber material that can apply two different types of skin stimulation: brush and stretch. The stimulator has a modular design, and can be used to test the tactile perception in different parts of the body such as the hand, arm, leg, big toe, etc. The recorder is a passive pantograph that can measure hand motion using two potentiometers. The recorder can serve multiple purposes: participants can move its handle to match the direction and amplitude of the tactile stimulator, or they can use it as a master manipulator to control the tactile stimulator as a slave. Our ultimate goal is to assess and affect tactile acuity and somatosensory deficits. To demonstrate the feasibility of our novel system, we tested the with 16 healthy individuals and with three stroke survivors using the skin-brush stimulation. We verified that the system enables the mapping of tactile perception on the hand in both populations. We also tested the extent to which 30 min of training in healthy individuals led to an improvement of tactile perception. The results provide a first demonstration of the ability of this new system to characterize tactile perception in healthy individuals, as well as a quantification of the magnitude and pattern of tactile impairment in a small cohort of stroke survivors. The finding that short-term training with can improve the acuity of tactile perception in healthy individuals suggests that may have utility as a therapeutic intervention for somatosensory deficits.
许多神经疾病会损害运动和躯体感觉系统。虽然临床实践中使用了几种不同的技术来评估和改善运动功能,但躯体感觉是通过定性临床量表进行主观评估的。躯体感觉缺陷的治疗受到的关注有限。为了弥合运动与躯体感觉能力评估和训练之间的差距,我们设计、开发并测试了一种新型、低成本、双组件(双手)机电一体化系统,用于针对触觉躯体感觉:触觉刺激器和记录器。刺激器是一种由两个伺服电机驱动的驱动缩放仪结构,其末端执行器覆盖有橡胶材料,可施加两种不同类型的皮肤刺激:刷动和拉伸。刺激器采用模块化设计,可用于测试身体不同部位(如手、手臂、腿、大脚趾等)的触觉感知。记录器是一个被动缩放仪,可使用两个电位计测量手部运动。记录器有多种用途:参与者可以移动其手柄以匹配触觉刺激器的方向和幅度,或者他们可以将其用作主操纵器来控制作为从设备的触觉刺激器。我们的最终目标是评估并影响触觉敏锐度和躯体感觉缺陷。为了证明我们新系统的可行性,我们使用皮肤刷动刺激对16名健康个体和三名中风幸存者进行了测试。我们验证了该系统能够在这两个人群中对手部的触觉感知进行映射。我们还测试了健康个体进行30分钟训练后触觉感知改善的程度。结果首次证明了这种新系统能够在健康个体中表征触觉感知,以及对一小群中风幸存者触觉损伤的程度和模式进行量化。使用该系统进行短期训练可提高健康个体触觉感知敏锐度的发现表明,该系统可能作为一种治疗躯体感觉缺陷的干预措施具有实用价值。