Sharbafi Maziar A, Barazesh Hamid, Iranikhah Majid, Seyfarth Andre
Control and Intelligent Processing Center of Excellence, School of Electrical and Computer Engineering, University of Tehran, Tehran, Iran.
Lauflabor Locomotion Laboratory, Institute of Sport Science, Centre for Cognitive Science, Technische Universität Darmstadt, Darmstadt, Germany.
Front Neurorobot. 2018 Jul 11;12:39. doi: 10.3389/fnbot.2018.00039. eCollection 2018.
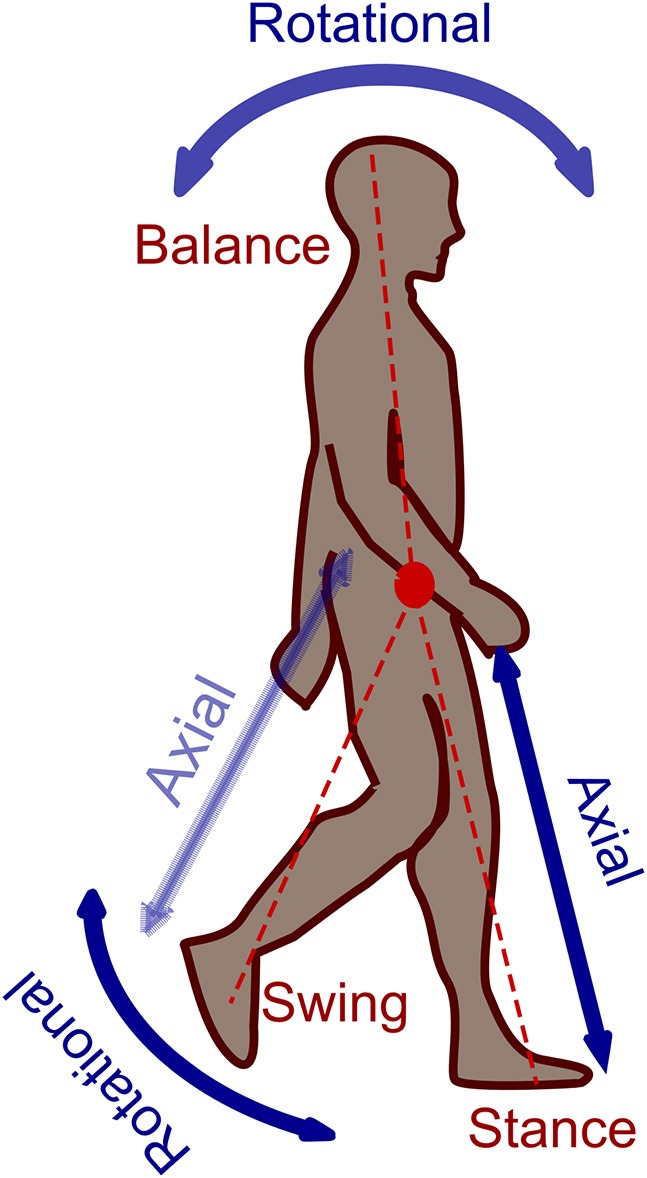
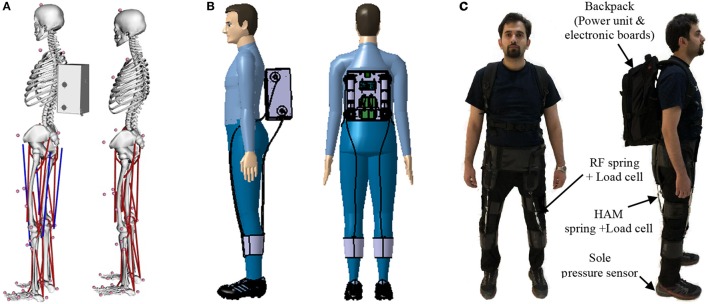
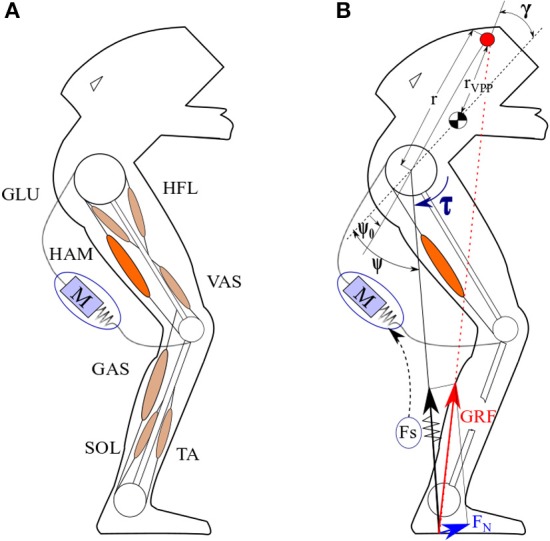
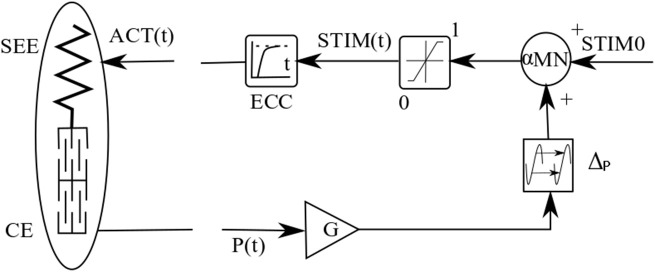
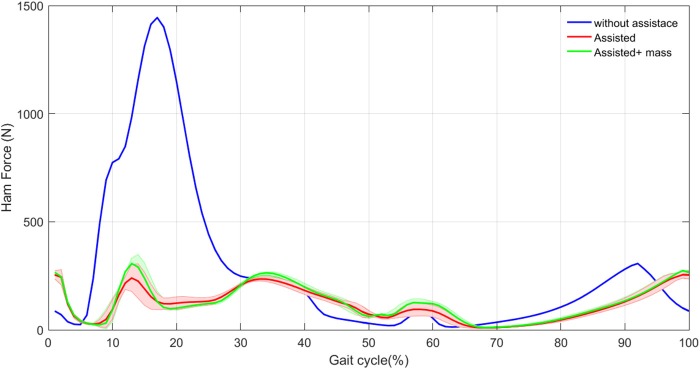
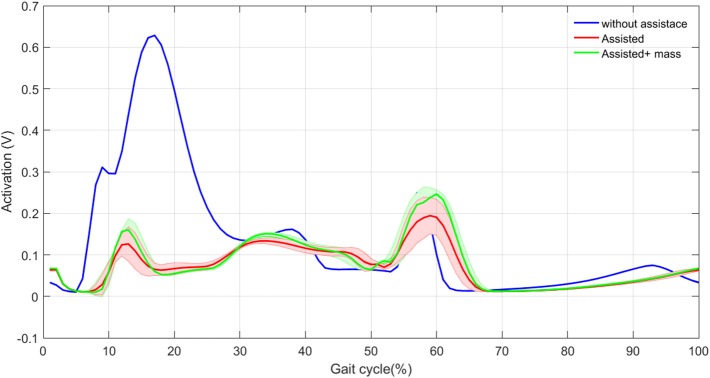
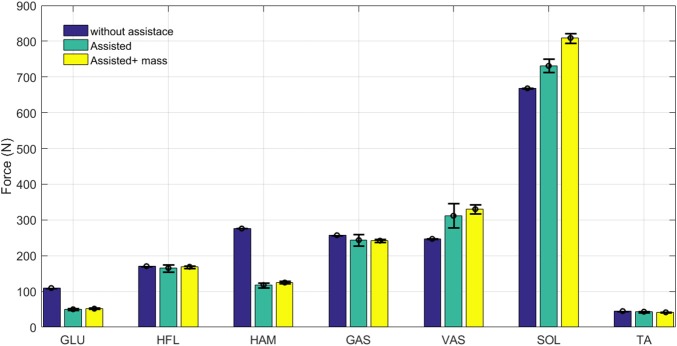
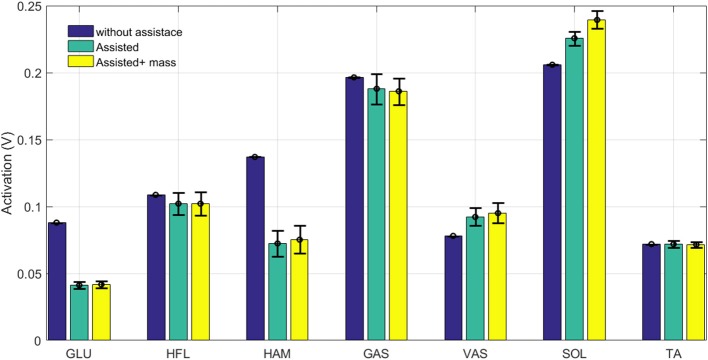
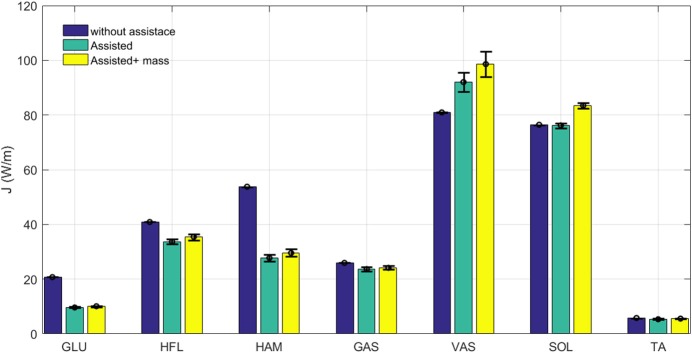
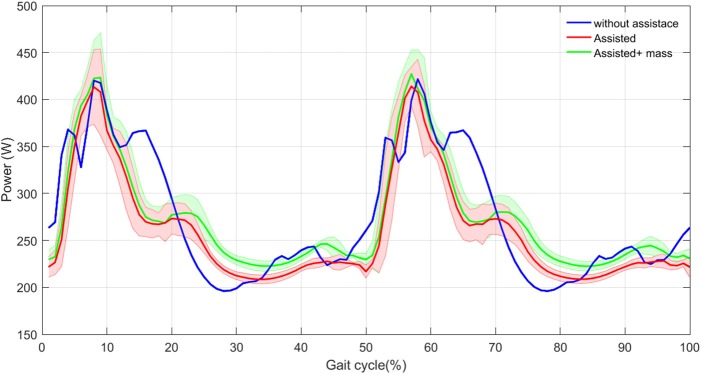
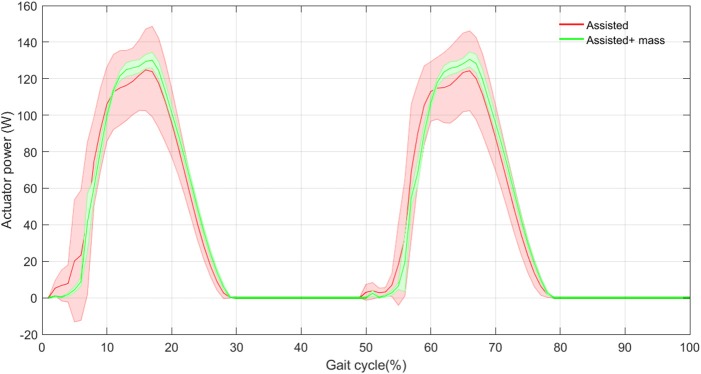
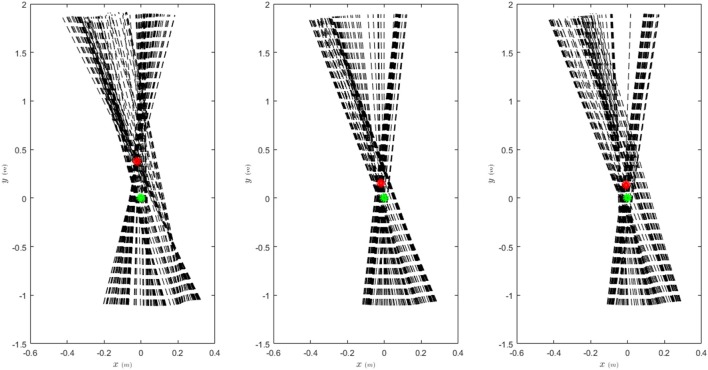
Assistive devices can be considered as one of the main applications of legged locomotion research in daily life. In order to develop an efficient and comfortable prosthesis or exoskeleton, biomechanical studies on human locomotion are very useful. In this paper, the applicability of the FMCH (force modulated compliant hip) model is investigated for control of lower limb wearable exoskeletons. This is a bioinspired method for posture control, which is based on the virtual pivot point (VPP) concept, found in human walking. By implementing the proposed method on a detailed neuromuscular model of human walking, we showed that using a biarticular actuator parallel to the hamstring muscle, activation in most of the leg muscles can be reduced. In addition, the total metabolic cost of motion is decreased up to 12%. The simple control rule of assistance is based on leg force feedback which is the only required sensory information.
辅助设备可被视为腿部运动研究在日常生活中的主要应用之一。为了开发高效且舒适的假肢或外骨骼,对人类运动的生物力学研究非常有用。本文研究了力调制柔顺髋关节(FMCH)模型在下肢可穿戴外骨骼控制中的适用性。这是一种受生物启发的姿势控制方法,基于在人类行走中发现的虚拟枢轴点(VPP)概念。通过在详细的人类行走神经肌肉模型上实施所提出的方法,我们表明,使用与腿筋肌肉平行的双关节致动器,可以减少大部分腿部肌肉的激活。此外,运动的总代谢成本降低了12%。简单的辅助控制规则基于腿部力反馈,这是唯一所需的感官信息。