Martel Sylvain, Mohammadi Mahmood
NanoRobotics Laboratory, Department of Computer and Software Engineering, Institute of Biomedical Engineering, Polytechnique Montréal, Montréal, QC H3T 1J4, Canada.
Micromachines (Basel). 2016 May 25;7(6):97. doi: 10.3390/mi7060097.
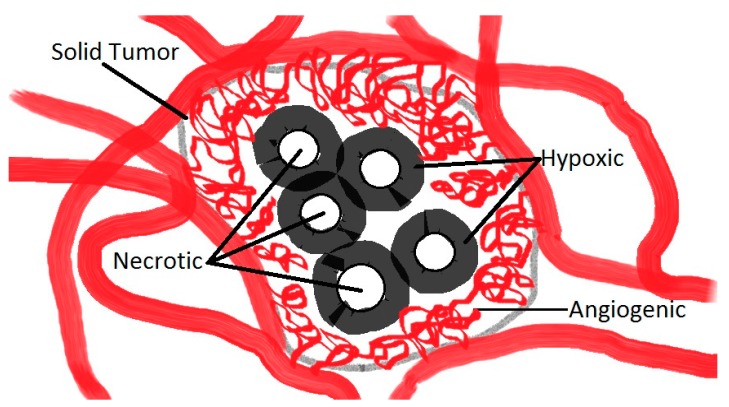
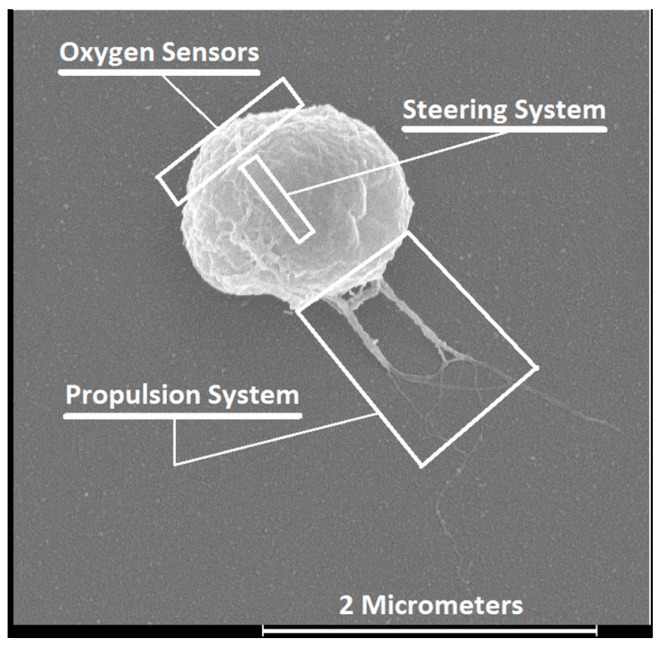
The delivery of drug molecules to tumor hypoxic areas could yield optimal therapeutic outcomes. This suggests that effective cancer-fighting micro- or nanorobots would require more integrated functionalities than just the development of directional propelling constructs which have so far been the main general emphasis in medical micro- and nanorobotic research. Development of artificial agents that would be most effective in targeting hypoxic regions may prove to be a very challenging task considering present technological constraints. Self-propelled, sensory-based and directionally-controlled agents in the form of Magnetotactic Bacteria (MTB) of the MC-1 strain have been investigated as effective therapeutic nanorobots in cancer therapy. Following computer-based magnetotactic guidance to reach the tumor area, the microaerophilic response of drug-loaded MC-1 cells could be exploited in the tumoral interstitial fluid microenvironments. Accordingly, their swimming paths would be guided by a decreasing oxygen concentration towards the hypoxic regions. However, the implementation of such a targeting strategy calls for a method to switch from a computer-assisted magnetotactic displacement control to an autonomous aerotactic displacement control. In this way, the MC-1 cells will navigate to tumoral regions and, once there, target hypoxic areas through their microaerophilic behavior. Here we show not only how the magnitude of the magnetic field can be used for this purpose but how the findings could help determine the specifications of a future compatible interventional platform within known technological and medical constraints.
将药物分子递送至肿瘤缺氧区域可产生最佳治疗效果。这表明,有效的抗癌微型或纳米机器人需要具备比目前主要侧重于开发定向推进结构更多的集成功能,而定向推进结构一直是医学微型和纳米机器人研究的主要重点。考虑到目前的技术限制,开发在靶向缺氧区域方面最有效的人工制剂可能是一项极具挑战性的任务。作为癌症治疗中有效的治疗性纳米机器人,已对MC-1菌株的趋磁细菌(MTB)形式的自推进、基于感官和方向可控的制剂进行了研究。在基于计算机的趋磁引导下到达肿瘤区域后,载药MC-1细胞的微需氧反应可在肿瘤间质液微环境中加以利用。因此,它们的游动路径将由氧气浓度降低引导至缺氧区域。然而,实施这种靶向策略需要一种从计算机辅助趋磁位移控制切换到自主趋氧位移控制的方法。通过这种方式,MC-1细胞将导航至肿瘤区域,并一旦到达那里,通过其微需氧行为靶向缺氧区域。在此,我们不仅展示了如何利用磁场强度实现这一目的,还展示了这些发现如何有助于在已知的技术和医学限制内确定未来兼容介入平台的规格。