Rockefeller Neuroscience Institute, School of Medicine, West Virginia University, Morgantown, WV, United States of America.
Department of Neuroscience, School of Medicine, West Virginia University, Morgantown, West Virginia, United States of America.
PLoS Comput Biol. 2020 Dec 16;16(12):e1008350. doi: 10.1371/journal.pcbi.1008350. eCollection 2020 Dec.
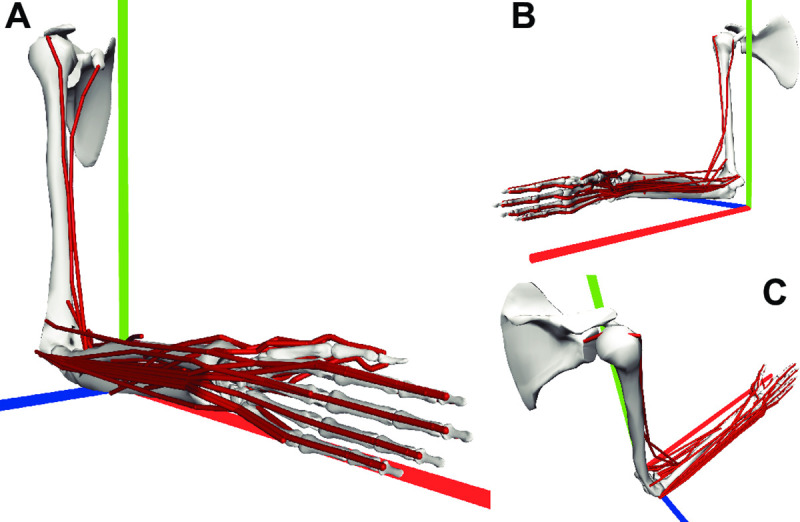
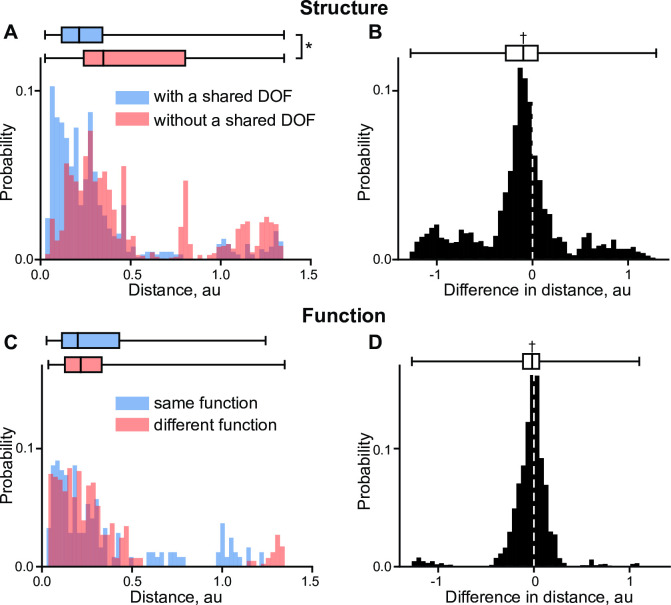
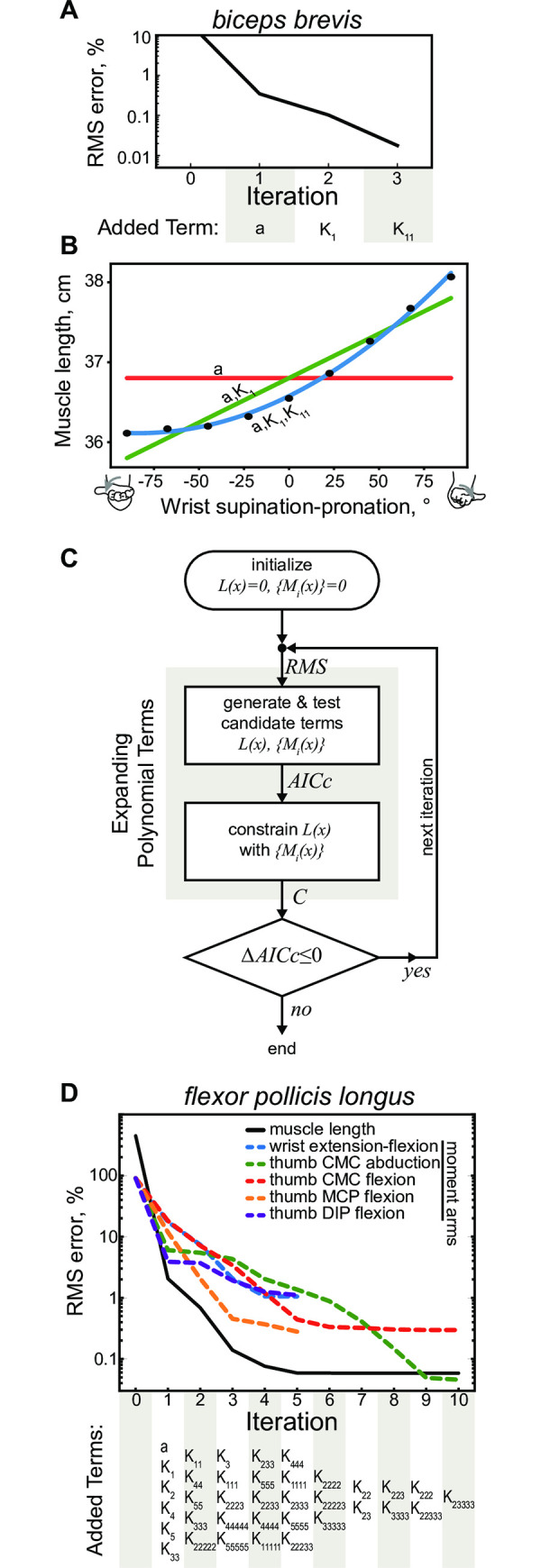
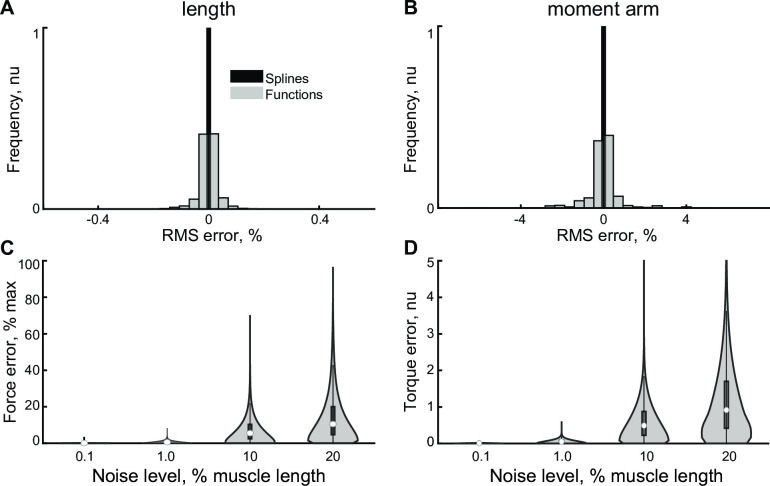
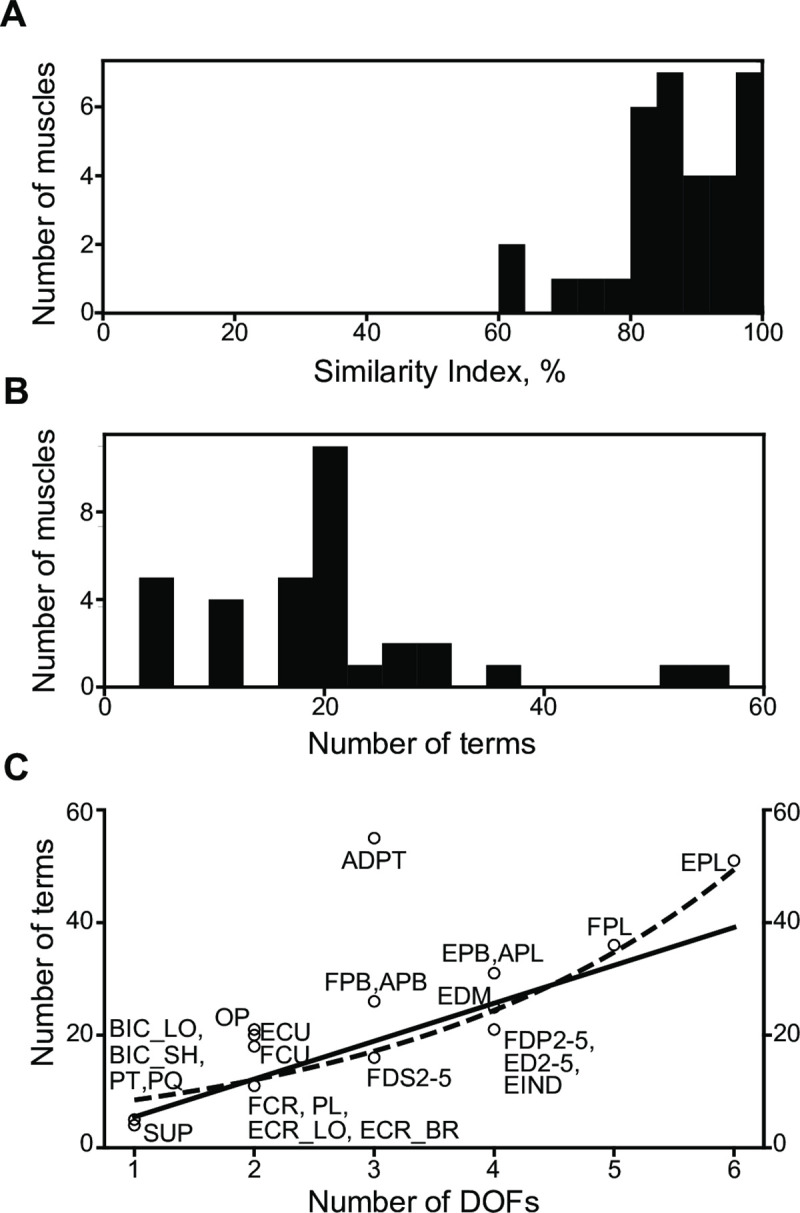
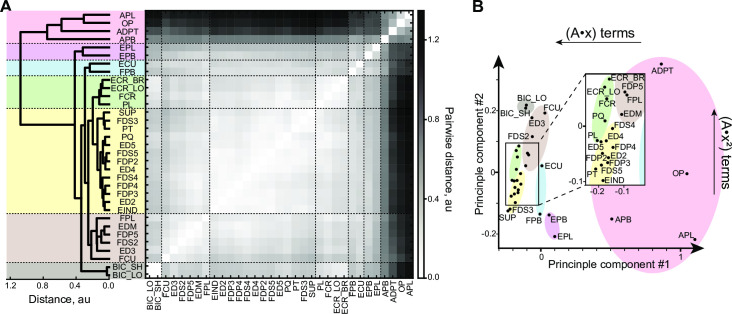
Computational models of the musculoskeletal system are scientific tools used to study human movement, quantify the effects of injury and disease, plan surgical interventions, or control realistic high-dimensional articulated prosthetic limbs. If the models are sufficiently accurate, they may embed complex relationships within the sensorimotor system. These potential benefits are limited by the challenge of implementing fast and accurate musculoskeletal computations. A typical hand muscle spans over 3 degrees of freedom (DOF), wrapping over complex geometrical constraints that change its moment arms and lead to complex posture-dependent variation in torque generation. Here, we report a method to accurately and efficiently calculate musculotendon length and moment arms across all physiological postures of the forearm muscles that actuate the hand and wrist. Then, we use this model to test the hypothesis that the functional similarities of muscle actions are embedded in muscle structure. The posture dependent muscle geometry, moment arms and lengths of modeled muscles were captured using autogenerating polynomials that expanded their optimal selection of terms using information measurements. The iterative process approximated 33 musculotendon actuators, each spanning up to 6 DOFs in an 18 DOF model of the human arm and hand, defined over the full physiological range of motion. Using these polynomials, the entire forearm anatomy could be computed in <10 μs, which is far better than what is required for real-time performance, and with low errors in moment arms (below 5%) and lengths (below 0.4%). Moreover, we demonstrate that the number of elements in these autogenerating polynomials does not increase exponentially with increasing muscle complexity; complexity increases linearly instead. Dimensionality reduction using the polynomial terms alone resulted in clusters comprised of muscles with similar functions, indicating the high accuracy of approximating models. We propose that this novel method of describing musculoskeletal biomechanics might further improve the applications of detailed and scalable models to describe human movement.
肌肉骨骼系统的计算模型是用于研究人体运动、量化损伤和疾病影响、规划手术干预或控制逼真的高维 articulated 假肢的科学工具。如果模型足够准确,它们可能会在感觉运动系统内嵌入复杂的关系。这些潜在的好处受到实现快速准确的肌肉骨骼计算的挑战的限制。典型的手部肌肉跨越超过 3 个自由度 (DOF),包裹在复杂的几何约束中,这些约束改变其力矩臂,导致产生扭矩的复杂姿势依赖性变化。在这里,我们报告了一种方法,可以准确高效地计算驱动手和手腕的前臂肌肉的所有生理姿势的肌肉肌腱长度和力矩臂。然后,我们使用该模型来测试肌肉动作的功能相似性嵌入在肌肉结构中的假设。使用自生成多项式来捕获姿势相关的肌肉几何形状、力矩臂和建模肌肉的长度,这些多项式使用信息测量扩展其术语的最佳选择。迭代过程逼近了 33 个肌肉肌腱执行器,每个执行器在人体手臂和手的 18 自由度模型中跨越多达 6 个自由度,定义在整个生理运动范围内。使用这些多项式,可以在 <10 μs 内计算整个前臂解剖结构,这远优于实时性能的要求,并且力矩臂(低于 5%)和长度(低于 0.4%)的误差很小。此外,我们证明了这些自生成多项式中的元素数量不会随肌肉复杂性的增加而呈指数增长;相反,复杂性呈线性增加。使用多项式项进行降维导致包含具有相似功能的肌肉的簇,这表明了近似模型的高精度。我们提出,这种描述肌肉骨骼生物力学的新方法可能会进一步提高详细和可扩展模型描述人体运动的应用。