Nagayo Yuri, Saito Toki, Oyama Hiroshi
Department of Clinical Information Engineering, Graduate School of Medicine, University of Tokyo, 7-3-1 Hongo, Bunkyo-Ku, Tokyo, 113-0033, Japan.
J Med Syst. 2021 Apr 7;45(5):60. doi: 10.1007/s10916-021-01735-6.
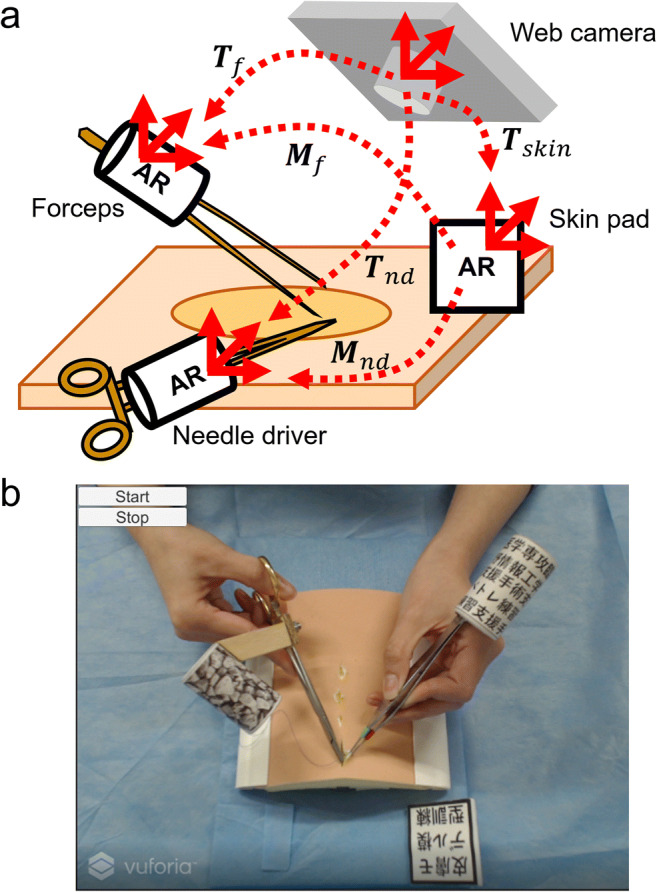
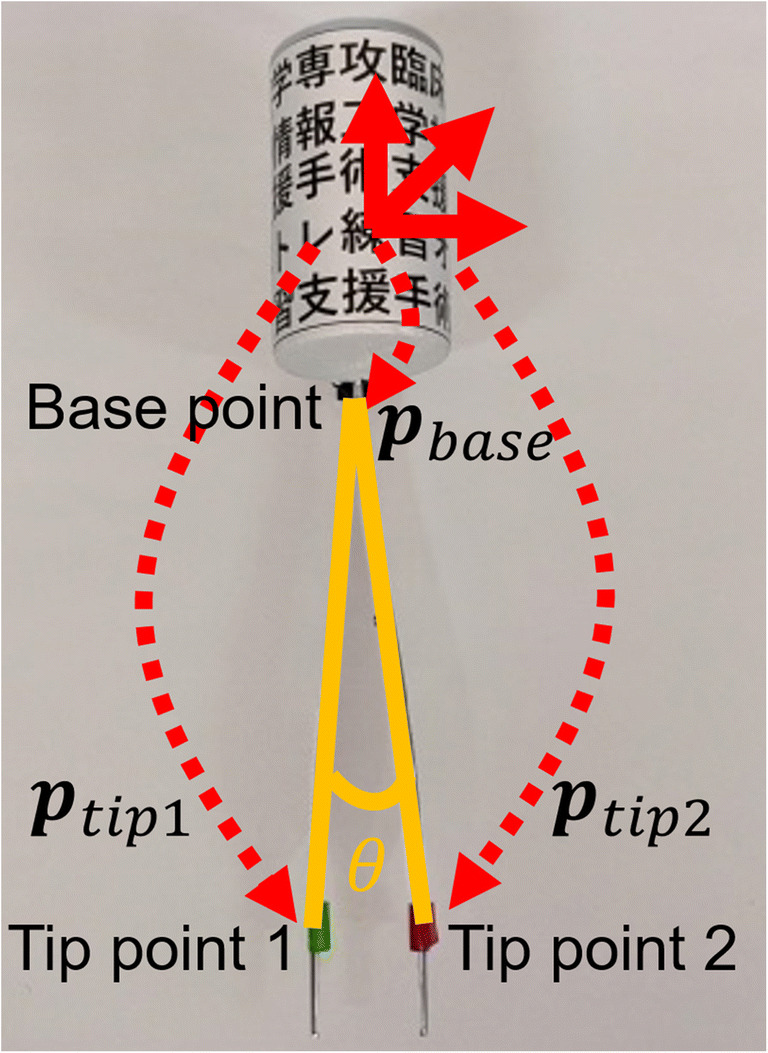
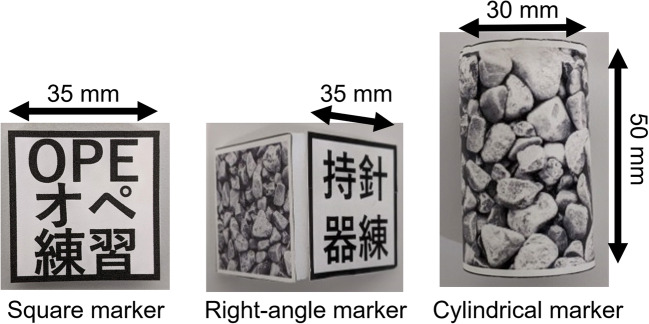
The surgical education environment has been changing significantly due to restricted work hours, limited resources, and increasing public concern for safety and quality, leading to the evolution of simulation-based training in surgery. Of the various simulators, low-fidelity simulators are widely used to practice surgical skills such as sutures because they are portable, inexpensive, and easy to use without requiring complicated settings. However, since low-fidelity simulators do not offer any teaching information, trainees do self-practice with them, referring to textbooks or videos, which are insufficient to learn open surgical procedures. This study aimed to develop a new suture training system for open surgery that provides trainees with the three-dimensional information of exemplary procedures performed by experts and allows them to observe and imitate the procedures during self-practice. The proposed system consists of a motion capture system of surgical instruments and a three-dimensional replication system of captured procedures on the surgical field. Motion capture of surgical instruments was achieved inexpensively by using cylindrical augmented reality (AR) markers, and replication of captured procedures was realized by visualizing them three-dimensionally at the same position and orientation as captured, using an AR device. For subcuticular interrupted suture, it was confirmed that the proposed system enabled users to observe experts' procedures from any angle and imitate them by manipulating the actual surgical instruments during self-practice. We expect that this training system will contribute to developing a novel surgical training method that enables trainees to learn surgical skills by themselves in the absence of experts.
由于工作时间受限、资源有限以及公众对安全和质量的关注度不断提高,外科教育环境发生了显著变化,这导致了基于模拟的外科培训的发展。在各种模拟器中,低仿真度模拟器因其便携、价格低廉且易于使用,无需复杂设置,而被广泛用于练习缝合等手术技能。然而,由于低仿真度模拟器不提供任何教学信息,学员只能参考教科书或视频自行练习,而这些对于学习开放手术操作来说是不够的。本研究旨在开发一种用于开放手术的新型缝合训练系统,为学员提供专家执行的示范操作的三维信息,并允许他们在自行练习期间观察和模仿这些操作。所提出的系统由手术器械的运动捕捉系统和手术视野中捕获操作的三维复制系统组成。通过使用圆柱形增强现实(AR)标记物,以低成本实现了手术器械的运动捕捉,并通过使用AR设备在与捕获时相同的位置和方向上对捕获的操作进行三维可视化,实现了捕获操作的复制。对于皮下间断缝合,证实了所提出的系统能够让用户从任何角度观察专家的操作,并在自行练习期间通过操作实际手术器械进行模仿。我们期望这个训练系统将有助于开发一种新颖的外科训练方法,使学员在没有专家的情况下能够自行学习手术技能。