Han Libiao, Xu Jiang, Wang Shuai, Yuan Ningyi, Ding Jianning
Jiangsu Collaborative Innovation Center of Photovoltaic Science and Engineering, Jiangsu Province Cultivation Base for State Key Laboratory of Photovoltaic Science and Technology, Changzhou University Changzhou 213164 Jiangsu China
School of Mechanical Engineering, Changzhou University Changzhou 213164 China.
RSC Adv. 2018 Mar 14;8(19):10302-10309. doi: 10.1039/c7ra13384g. eCollection 2018 Mar 13.
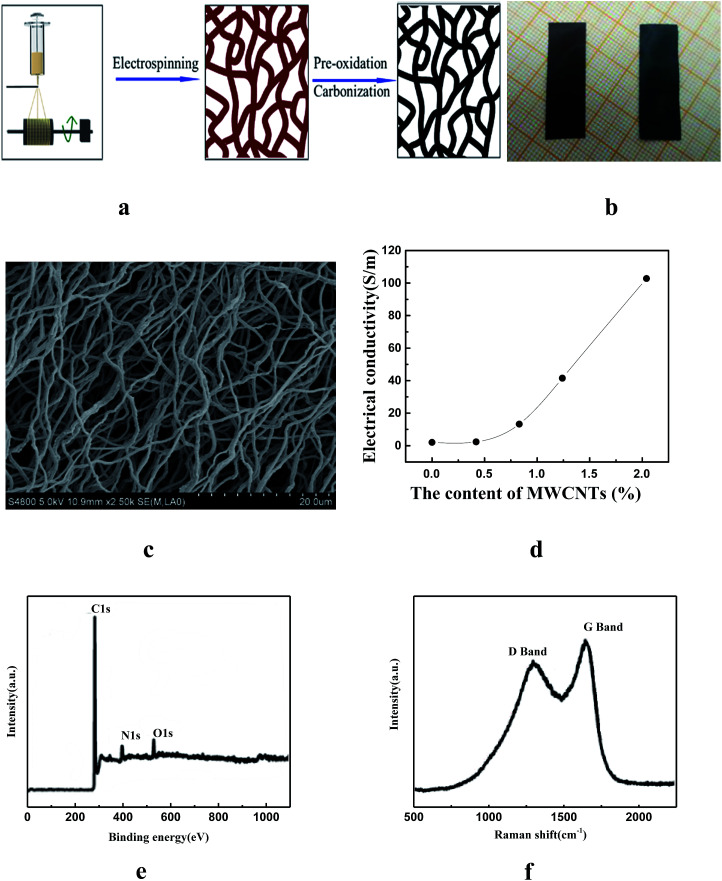
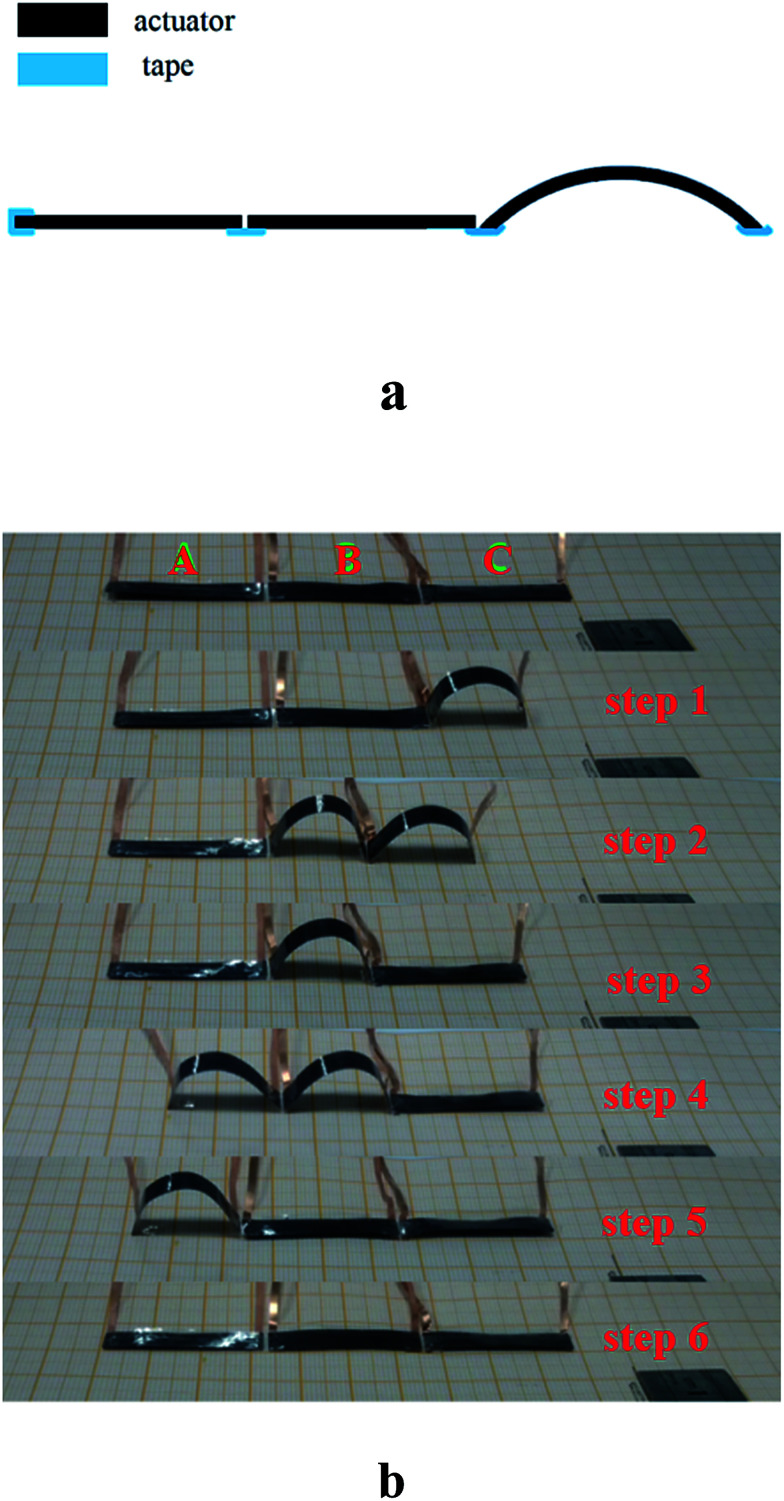
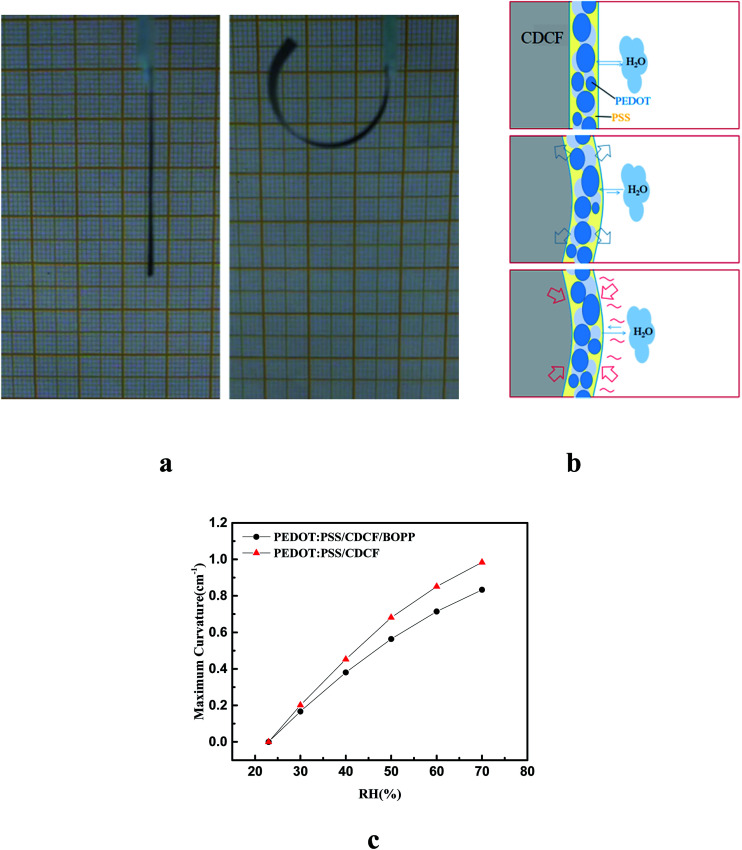
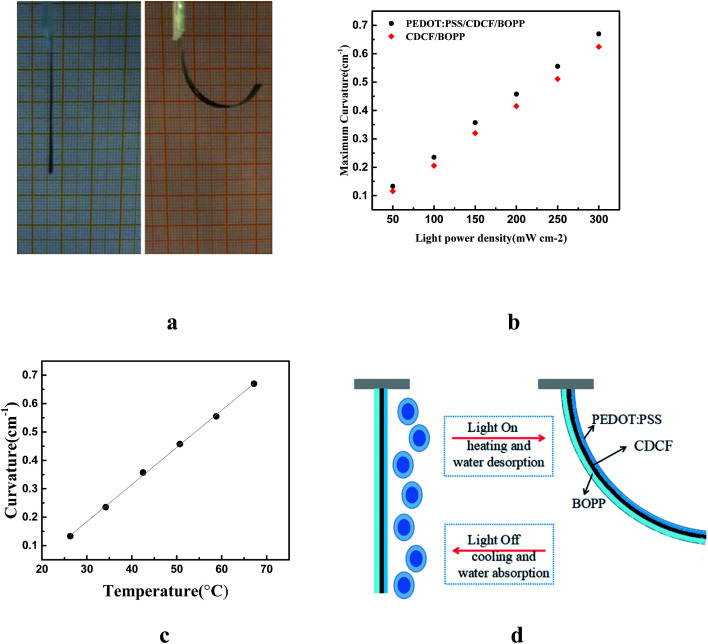
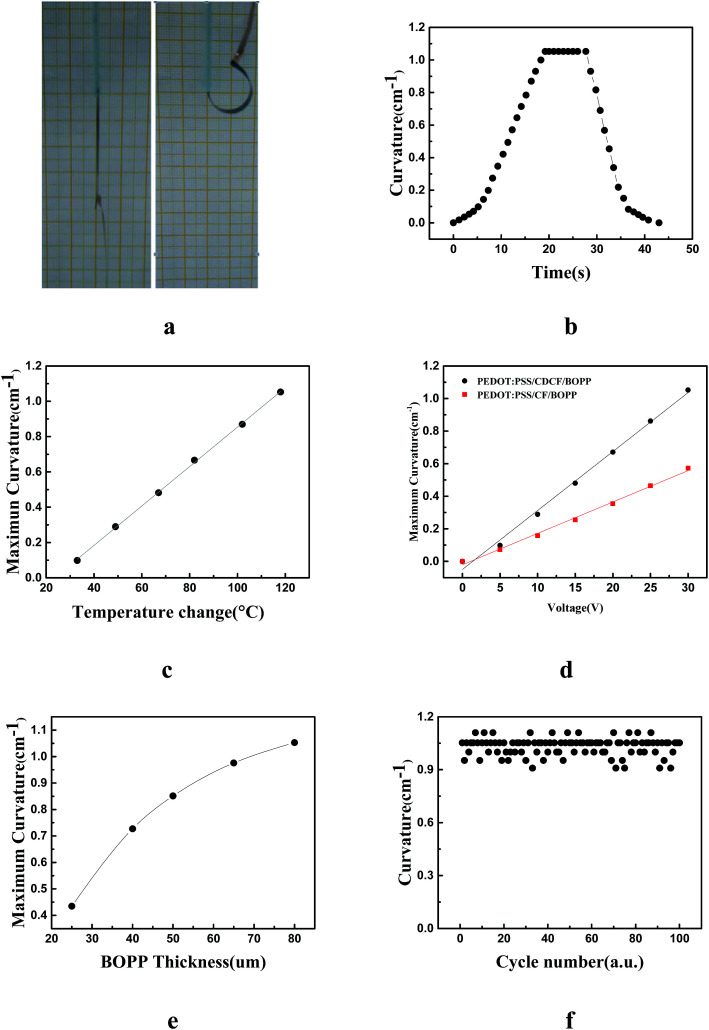
Robot technology has made great progress over the past few decades, and has found wide use in military, industrial and service fields. In recent years, there has been a dramatic increase in the demand for soft robots. However, as a key part, the development of soft actuators capable of low-energy actuation, multi-stimulation response, and large shape deformation is still challenging. In this work, we fabricated multiresponsive actuators based on modified electrospun films. The actuators provided the largest curvatures of 0.83 cm, 0.6 cm, and 1.05 cm, stimulated by humidity, light, and electricity, respectively. Furthermore, we designed a biomimetic application-a crawling robot-which demonstrates excellent potential applications of the actuator in soft robotics, artificial muscles, and the biomimetics field.
在过去几十年里,机器人技术取得了巨大进步,并在军事、工业和服务领域得到了广泛应用。近年来,对软机器人的需求急剧增加。然而,作为关键部件,能够实现低能量驱动、多刺激响应和大形状变形的软致动器的开发仍然具有挑战性。在这项工作中,我们基于改性电纺丝膜制备了多响应致动器。这些致动器在湿度、光和电的刺激下,分别提供了0.83厘米、0.6厘米和1.05厘米的最大曲率。此外,我们设计了一种仿生应用——爬行机器人——这展示了该致动器在软机器人技术、人造肌肉和仿生领域的优异潜在应用。