Müller-Putz Gernot R, Scherer Reinhold, Pfurtscheller Gert, Neuper Christa
Laboratory of Brain-Computer Interfaces, Institute for Knowledge Discovery, Graz University of Technology Graz, Austria.
Front Neurosci. 2010 Jun 18;4. doi: 10.3389/fnins.2010.00034. eCollection 2010.
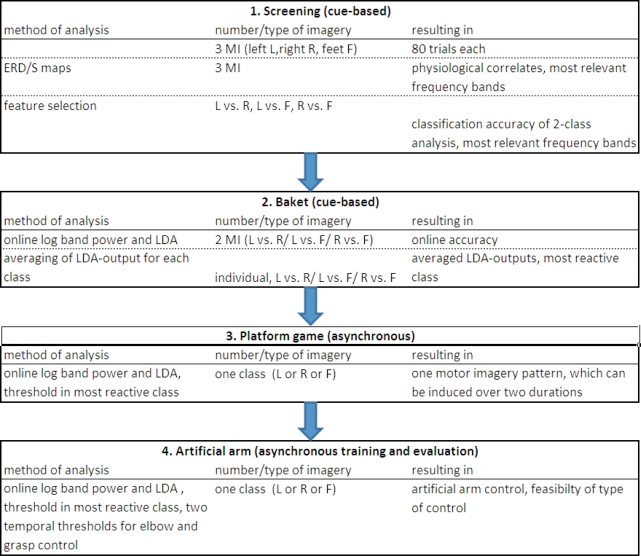
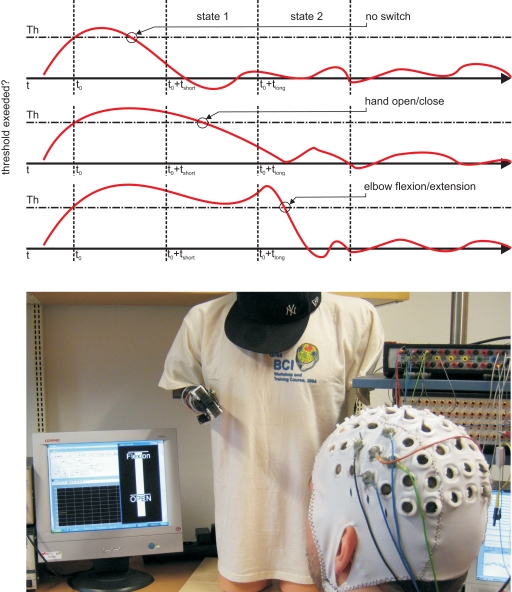
For individuals with a high spinal cord injury (SCI) not only the lower limbs, but also the upper extremities are paralyzed. A neuroprosthesis can be used to restore the lost hand and arm function in those tetraplegics. The main problem for this group of individuals, however, is the reduced ability to voluntarily operate device controllers. A brain-computer interface provides a non-manual alternative to conventional input devices by translating brain activity patterns into control commands. We show that the temporal coding of individual mental imagery pattern can be used to control two independent degrees of freedom - grasp and elbow function - of an artificial robotic arm by utilizing a minimum number of EEG scalp electrodes. We describe the procedure from the initial screening to the final application. From eight naïve subjects participating online feedback experiments, four were able to voluntarily control an artificial arm by inducing one motor imagery pattern derived from one EEG derivation only.
对于高位脊髓损伤(SCI)患者而言,不仅下肢,上肢也会瘫痪。神经假体可用于恢复这类四肢瘫痪患者丧失的手部和手臂功能。然而,这类患者的主要问题是自主操作设备控制器的能力下降。脑机接口通过将大脑活动模式转化为控制指令,为传统输入设备提供了一种非手动的替代方式。我们表明,利用最少数量的脑电图头皮电极,个体心理意象模式的时间编码可用于控制人造机械臂的两个独立自由度——抓握和肘部功能。我们描述了从初始筛选到最终应用的过程。在参与在线反馈实验的八名未经过训练的受试者中,有四名仅通过从一个脑电图导联导出的一种运动意象模式就能自主控制人造手臂。