Ohata Wataru, Tani Jun
Cognitive Neurorobotics Research Unit, Okinawa Institute of Science and Technology Graduate University, Okinawa, Japan.
Front Neurorobot. 2020 Sep 7;14:61. doi: 10.3389/fnbot.2020.00061. eCollection 2020.
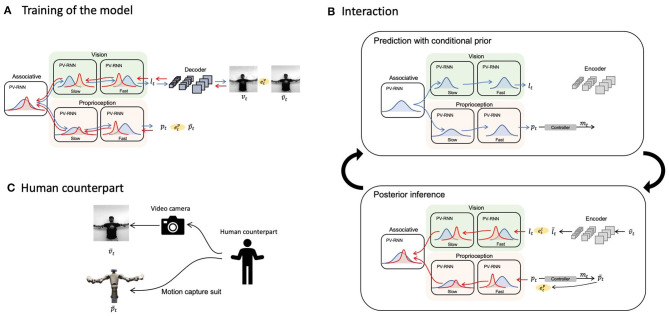
When agents interact socially with different intentions (or wills), conflicts are difficult to avoid. Although the means by which social agents can resolve such problems autonomously has not been determined, dynamic characteristics of agency may shed light on underlying mechanisms. Therefore, the current study focused on the sense of agency, a specific aspect of agency referring to congruence between the agent's intention in acting and the outcome, especially in social interaction contexts. Employing predictive coding and active inference as theoretical frameworks of perception and action generation, we hypothesize that regulation of complexity in the evidence lower bound of an agent's model should affect the strength of the agent's sense of agency and should have a significant impact on social interactions. To evaluate this hypothesis, we built a computational model of imitative interaction between a robot and a human via visuo-proprioceptive sensation with a variational Bayes recurrent neural network, and simulated the model in the form of pseudo-imitative interaction using recorded human body movement data, which serve as the counterpart in the interactions. A key feature of the model is that the complexity of each modality can be regulated differently by changing the values of a hyperparameter assigned to each local module of the model. We first searched for an optimal setting of hyperparameters that endow the model with appropriate coordination of multimodal sensation. These searches revealed that complexity of the vision module should be more tightly regulated than that of the proprioception module because of greater uncertainty in visual information flow. Using this optimally trained model as a default model, we investigated how changing the tightness of complexity regulation in the entire network after training affects the strength of the sense of agency during imitative interactions. The results showed that with looser regulation of complexity, an agent tends to act more egocentrically, without adapting to the other. In contrast, with tighter regulation, the agent tends to follow the other by adjusting its intention. We conclude that the tightness of complexity regulation significantly affects the strength of the sense of agency and the dynamics of interactions between agents in social settings.
当主体带着不同意图(或意愿)进行社会互动时,冲突难以避免。尽管社会主体自主解决此类问题的方式尚未确定,但主体的动态特征可能有助于揭示潜在机制。因此,当前研究聚焦于主体感,这是主体的一个特定方面,指主体行动意图与结果之间的一致性,尤其是在社会互动情境中。我们以预测编码和主动推理作为感知和行动生成的理论框架,假设调节主体模型证据下限中的复杂性应会影响主体感的强度,并对社会互动产生重大影响。为了评估这一假设,我们通过变分贝叶斯递归神经网络,构建了一个机器人与人类之间通过视觉 - 本体感觉进行模仿互动的计算模型,并使用记录的人体运动数据以伪模仿互动的形式对该模型进行模拟,这些数据在互动中充当对方。该模型的一个关键特征是,通过改变分配给模型每个局部模块的超参数值,可以不同地调节每种模态的复杂性。我们首先寻找超参数的最优设置,以使模型具备多模态感知的适当协调。这些搜索结果表明,由于视觉信息流中的不确定性更大,视觉模块的复杂性应比本体感觉模块受到更严格的调节。以这个经过最优训练的模型作为默认模型,我们研究了训练后改变整个网络中复杂性调节的松紧程度如何影响模仿互动过程中主体感的强度。结果表明,复杂性调节较宽松时,主体倾向于更以自我为中心地行动,而不适应对方。相反,调节较严格时,主体倾向于通过调整其意图来跟随对方。我们得出结论,复杂性调节的松紧程度会显著影响主体感的强度以及社会环境中主体之间互动的动态变化。