Peng Qianbi, Wang Shu, Han Jianguo, Huang Chenyang, Yu Hengyuan, Li Dong, Qiu Ming, Cheng Si, Wu Chong, Cai Mingxue, Fu Shixiong, Chen Binghan, Wu Xinyu, Du Shiwei, Xu Tiantian
Guangdong Provincial Key Lab of Robotics and Intelligent Systems, Shenzhen Institute of Advanced Technology, Chinese Academy of Sciences, Shenzhen, China.
University of Chinese Academy of Sciences, Beijing, China.
Research (Wash D C). 2024 Mar 26;7:0339. doi: 10.34133/research.0339. eCollection 2024.
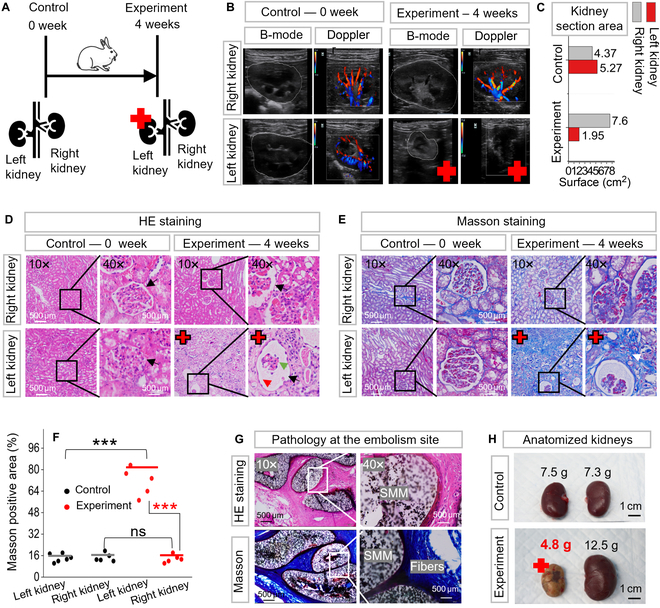
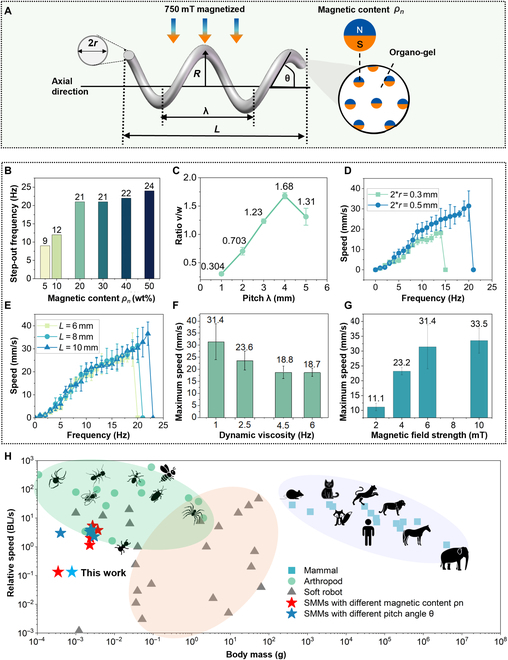
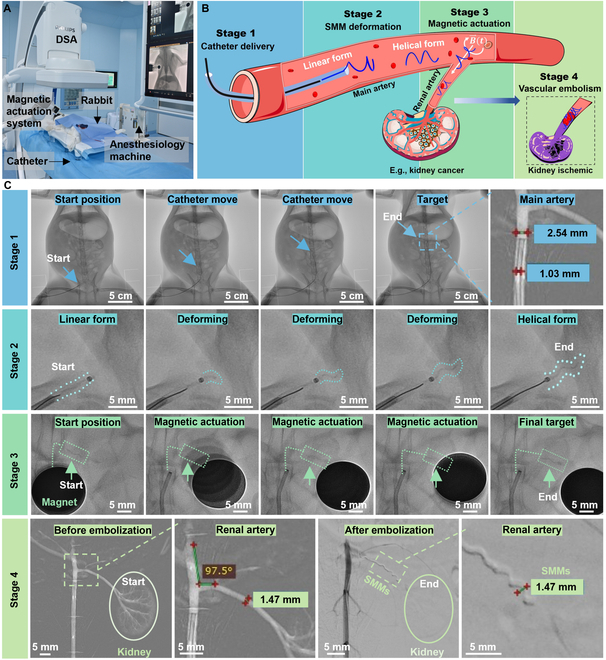
Catheters navigating through complex vessels, such as sharp turns or multiple U-turns, remain challenging for vascular embolization. Here, we propose a novel multistage vascular embolization strategy for hard-to-reach vessels that releases untethered swimming shape-memory magnetic microrobots (SMMs) from the prior catheter to the vessel bifurcation. SMMs, made of organo-gel with magnetic particles, ensure biocompatibility, radiopacity, thrombosis, and fast thermal and magnetic responses. An SMM is initially a linear shape with a 0.5-mm diameter at 20 °C inserted in a catheter. It transforms into a predetermined helix within 2 s at 38 °C blood temperature after being pushed out of the catheter into the blood. SMMs enable agile swimming in confined and tortuous vessels and can swim upstream using helical propulsion with rotating magnetic fields. Moreover, we validated this multistage vascular embolization in living rabbits, completing 100-cm travel and renal artery embolization in 2 min. After 4 weeks, the SMMs maintained the embolic position, and the kidney volume decreased by 36%.
对于血管栓塞而言,让导管在复杂血管(如急转弯或多个U形转弯处)中导航仍然具有挑战性。在此,我们提出一种针对难以到达的血管的新型多阶段血管栓塞策略,该策略可将无束缚的游动形状记忆磁性微型机器人(SMM)从前置导管释放到血管分支处。由含有磁性颗粒的有机凝胶制成的SMM确保了生物相容性、射线不透性、血栓形成以及快速的热和磁响应。SMM最初是一种直径为0.5毫米的线性形状,在20°C时插入导管中。在被从导管推注到血液中后,它在38°C的血液温度下2秒内转变为预定的螺旋形状。SMM能够在狭窄且曲折的血管中灵活游动,并可利用旋转磁场通过螺旋推进实现逆流游动。此外,我们在活体兔身上验证了这种多阶段血管栓塞,在2分钟内完成了100厘米的行程和肾动脉栓塞。4周后,SMM保持栓塞位置,肾脏体积缩小了36%。