Center for Advanced Functional Nanorobots, Department of Inorganic Chemistry, University of Chemistry and Technology Prague, Technicka 5, 166 28 Prague 6, Czech Republic.
Multi-Scale Robotics Lab (MSRL), Institute of Robotics and Intelligent Systems (IRIS), ETH Zurich, Tannenstrasse 3, 8092 Zurich, Switzerland.
Chem Rev. 2021 Apr 28;121(8):4999-5041. doi: 10.1021/acs.chemrev.0c01234. Epub 2021 Mar 31.
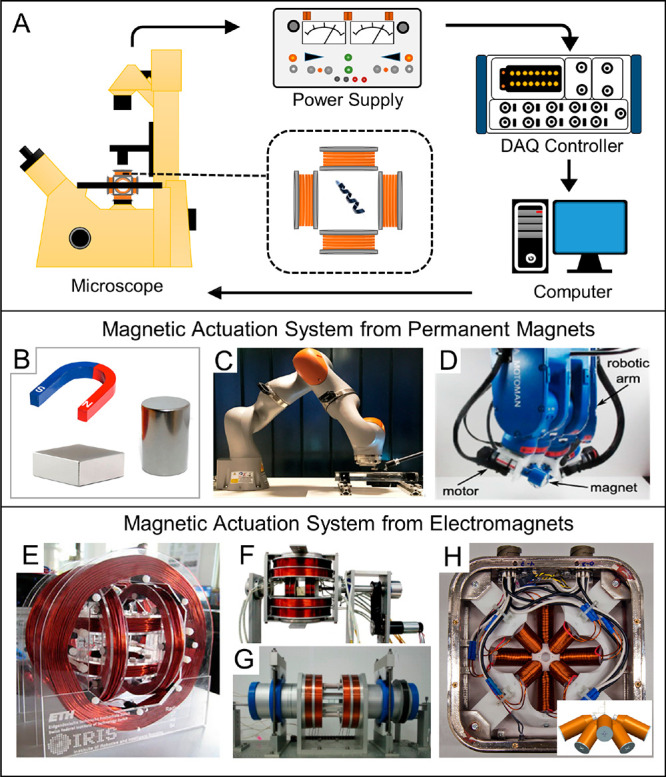
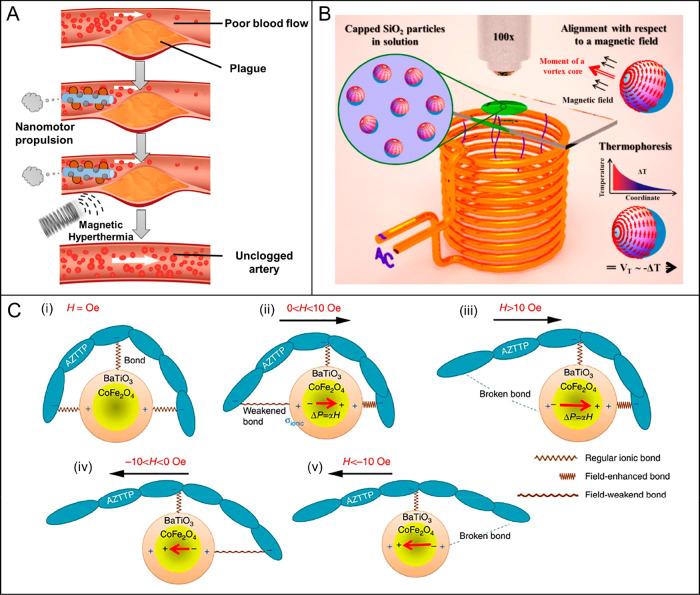
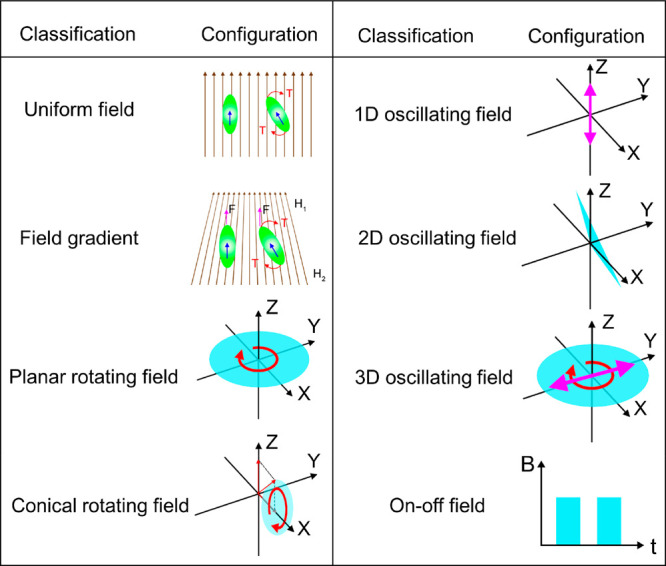
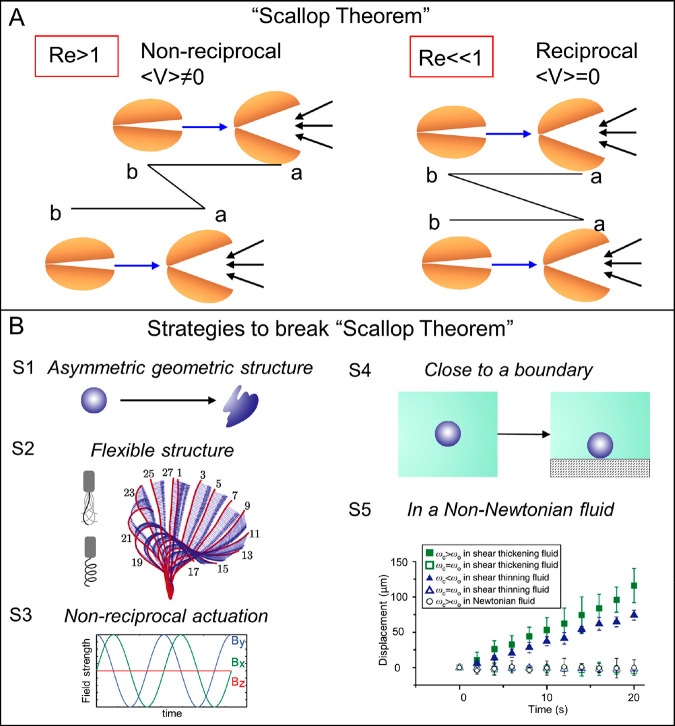
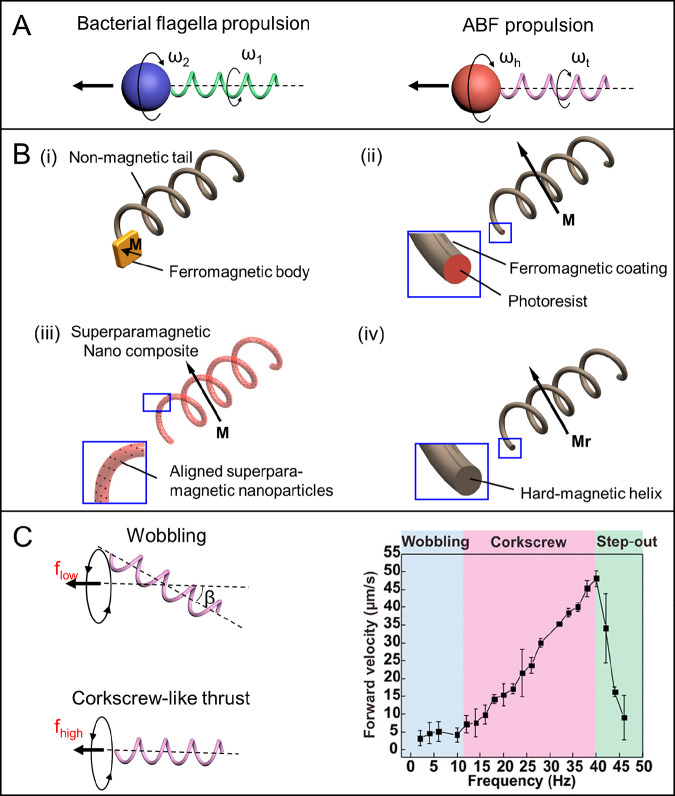
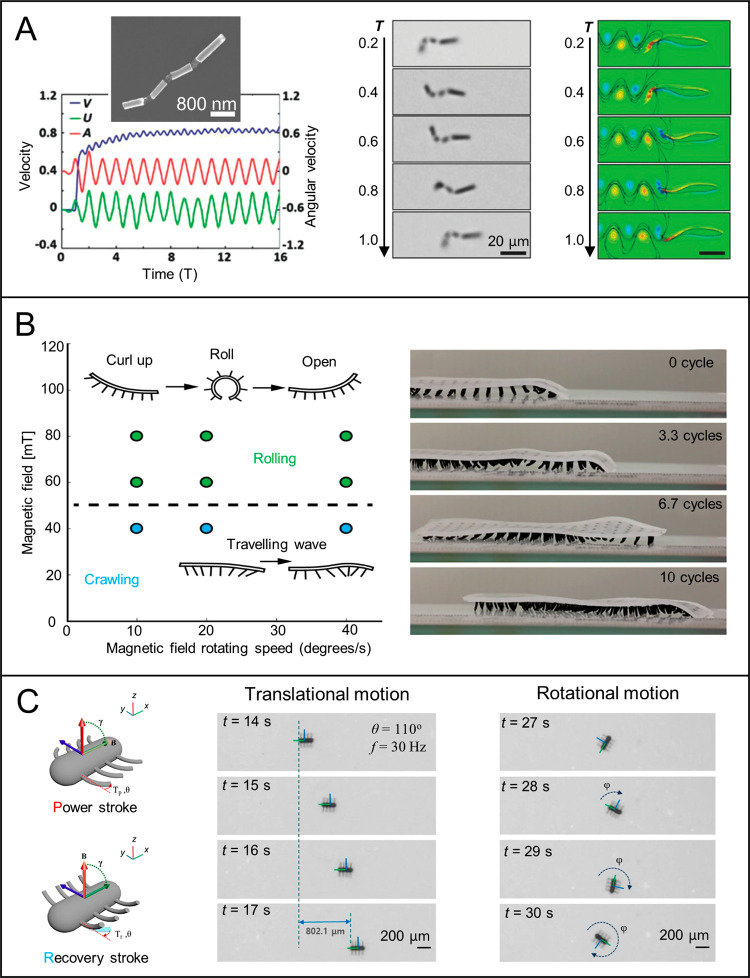
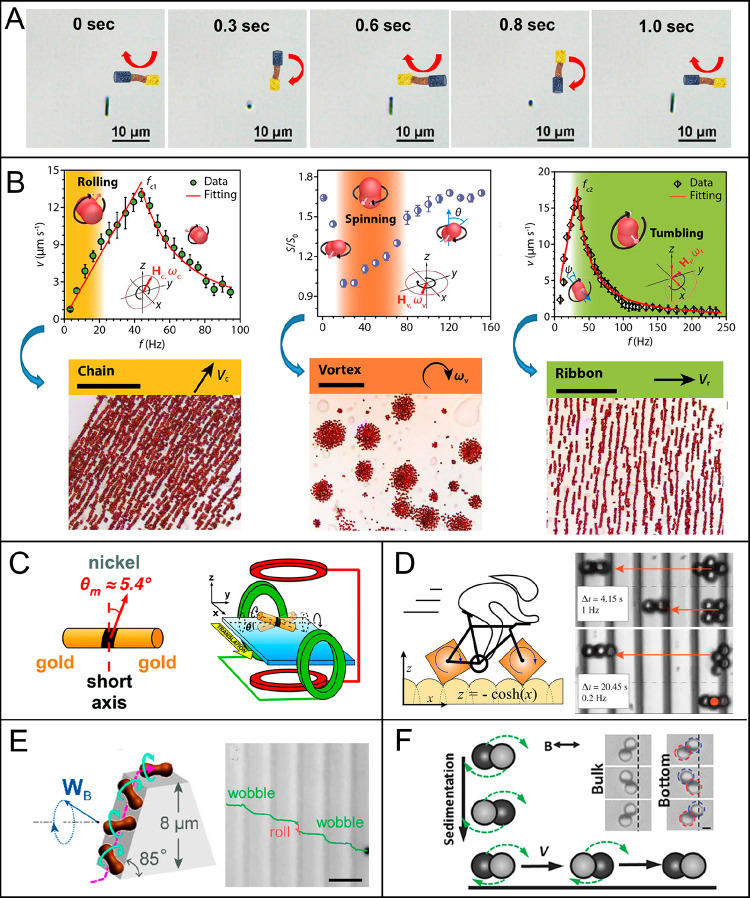
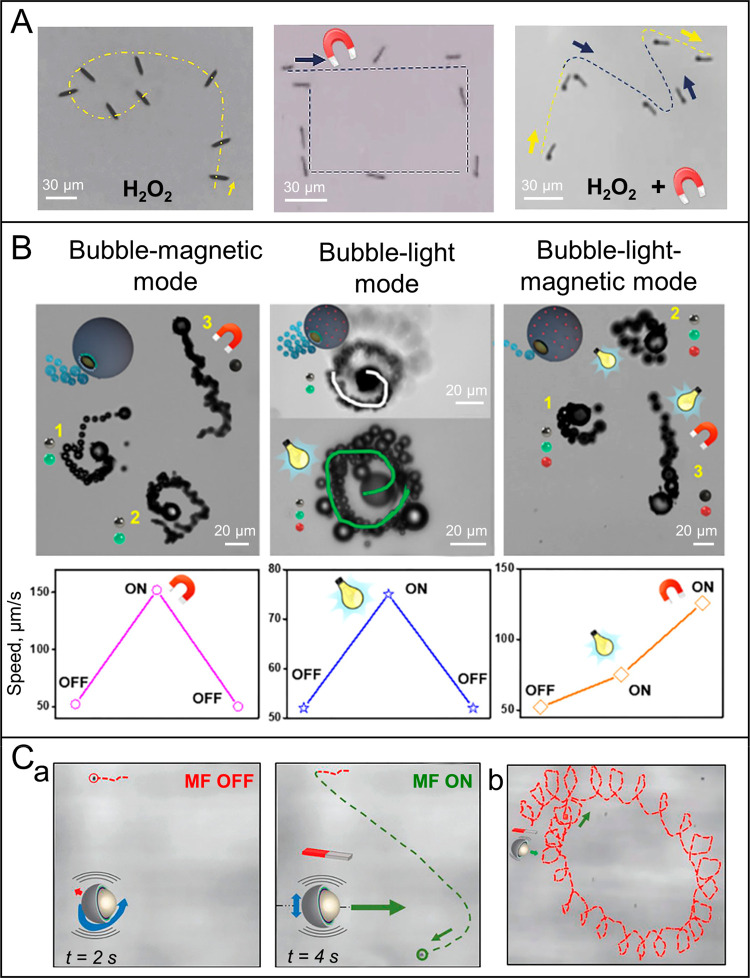
Manipulation and navigation of micro and nanoswimmers in different fluid environments can be achieved by chemicals, external fields, or even motile cells. Many researchers have selected magnetic fields as the active external actuation source based on the advantageous features of this actuation strategy such as remote and spatiotemporal control, fuel-free, high degree of reconfigurability, programmability, recyclability, and versatility. This review introduces fundamental concepts and advantages of magnetic micro/nanorobots (termed here as "MagRobots") as well as basic knowledge of magnetic fields and magnetic materials, setups for magnetic manipulation, magnetic field configurations, and symmetry-breaking strategies for effective movement. These concepts are discussed to describe the interactions between micro/nanorobots and magnetic fields. Actuation mechanisms of flagella-inspired MagRobots (i.e., corkscrew-like motion and traveling-wave locomotion/ciliary stroke motion) and surface walkers (i.e., surface-assisted motion), applications of magnetic fields in other propulsion approaches, and magnetic stimulation of micro/nanorobots beyond motion are provided followed by fabrication techniques for (quasi-)spherical, helical, flexible, wire-like, and biohybrid MagRobots. Applications of MagRobots in targeted drug/gene delivery, cell manipulation, minimally invasive surgery, biopsy, biofilm disruption/eradication, imaging-guided delivery/therapy/surgery, pollution removal for environmental remediation, and (bio)sensing are also reviewed. Finally, current challenges and future perspectives for the development of magnetically powered miniaturized motors are discussed.
在不同的流体环境中,可以通过化学物质、外场甚至运动细胞来操纵和导航微纳米机器人。许多研究人员选择磁场作为主动外部驱动源,基于这种驱动策略的优势,如远程和时空控制、无燃料、高度可重构性、可编程性、可回收性和多功能性。本综述介绍了磁性微/纳米机器人(这里称为“MagRobots”)的基本概念和优势,以及磁场和磁性材料的基础知识、磁操纵的设置、磁场配置和用于有效运动的对称破缺策略。这些概念用于描述微/纳米机器人与磁场之间的相互作用。MagRobots 的致动机制(即,螺旋运动和行波运动/纤毛冲程运动)和表面行走器(即,表面辅助运动),磁场在其他推进方法中的应用,以及微/纳米机器人运动以外的磁刺激,然后介绍了(准)球形、螺旋形、柔性、线状和生物混合 MagRobots 的制造技术。MagRobots 在靶向药物/基因递送、细胞操作、微创手术、活检、生物膜破坏/消除、成像引导的递送/治疗/手术、环境污染修复和(生物)传感中的应用也进行了综述。最后,讨论了磁性驱动微型电机发展的当前挑战和未来展望。