New Jersey Institute of Technology, Department of Biomedical Engineering, University Heights Newark, NJ 07102, USA.
J Neuroeng Rehabil. 2009 Nov 16;6:40. doi: 10.1186/1743-0003-6-40.
We hypothesize that the integration of virtual reality (VR) with robot assisted rehabilitation could be successful if applied to children with hemiparetic CP. The combined benefits of increased attention provided by VR and the larger training stimulus afforded by adaptive robotics may increase the beneficial effects of these two approaches synergistically. This paper will describe the NJIT-RAVR system, which combines adaptive robotics with complex VR simulations for the rehabilitation of upper extremity impairments and function in children with CP and examine the feasibility of this system in the context of a two subject training study.
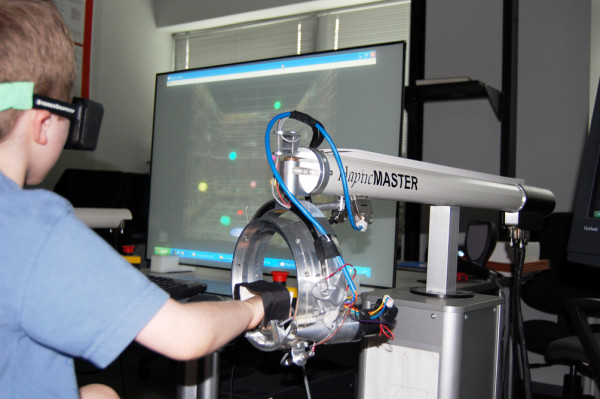
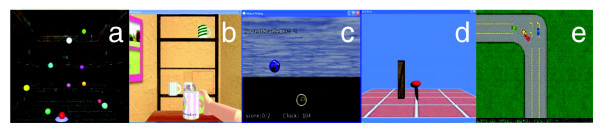
The NJIT-RAVR system consists of the Haptic Master, a 6 degrees of freedom, admittance controlled robot and a suite of rehabilitation simulations that provide adaptive algorithms for the Haptic Master, allowing the user to interact with rich virtual environments. Two children, a ten year old boy and a seven year old girl, both with spastic hemiplegia secondary to Cerebral Palsy were recruited from the outpatient center of a comprehensive pediatric rehabilitation facility. Subjects performed a battery of clinical testing and kinematic measurements of reaching collected by the NJIT-RAVR system. Subjects trained with the NJIT-RAVR System for one hour, 3 days a week for three weeks. The subjects played a combination of four or five simulations depending on their therapeutic goals, tolerances and preferences. Games were modified to increase difficulty in order to challenge the subjects as their performance improved. The testing battery was repeated following the training period.
Both participants completed 9 hours of training in 3 weeks. No untoward events occurred and no adverse responses to treatment or complaints of cyber sickness were reported. One participant showed improvements in overall performance on the functional aspects of the testing battery. The second subject made improvements in upper extremity active range of motion and in kinematic measures of reaching movements.
We feel that this study establishes the feasibility of integrating robotics and rich virtual environments to address functional limitations and decreased motor performance in children with mild to moderate cerebral palsy.
我们假设,如果将虚拟现实 (VR) 与机器人辅助康复相结合,应用于偏瘫脑瘫儿童,可能会取得成功。VR 提供的注意力增加和自适应机器人提供的更大训练刺激的综合益处可能会协同增加这两种方法的有益效果。本文将介绍 NJIT-RAVR 系统,该系统将自适应机器人与复杂的 VR 模拟相结合,用于治疗脑瘫儿童的上肢损伤和功能,并研究该系统在两项主题训练研究背景下的可行性。
NJIT-RAVR 系统由 Haptic Master 组成,这是一个具有 6 个自由度、导纳控制的机器人和一系列康复模拟,为 Haptic Master 提供自适应算法,允许用户与丰富的虚拟环境交互。从综合儿科康复中心的门诊中心招募了两名儿童,一名 10 岁男孩和一名 7 岁女孩,他们都因脑瘫而患有痉挛性偏瘫。研究对象进行了一系列临床测试和 NJIT-RAVR 系统采集的运动学测量,以评估上肢的运动功能。研究对象每周接受 3 次、每次 1 小时的 NJIT-RAVR 系统训练,共训练 3 周。根据治疗目标、耐受性和偏好,研究对象可以玩 4 到 5 个模拟游戏的组合。随着研究对象表现的提高,游戏会进行修改以增加难度,从而挑战他们。训练期结束后,重复测试测试。
两名参与者都在 3 周内完成了 9 小时的训练。没有发生不良事件,也没有报告治疗不良反应或网络眩晕的投诉。一名参与者在测试的功能方面的整体表现有所提高。第二位研究对象在上肢主动运动范围和运动的运动学测量方面有所改善。
我们认为,这项研究确立了将机器人技术与丰富的虚拟环境相结合,以解决轻度至中度脑瘫儿童的功能限制和运动表现下降的可行性。