Casadio Maura, Ranganathan Rajiv, Mussa-Ivaldi Ferdinando A
Sensory Motor Performance Program, Rehabilitation Institute of Chicago, Illinois 60611, USA.
J Mot Behav. 2012;44(6):419-33. doi: 10.1080/00222895.2012.700968.
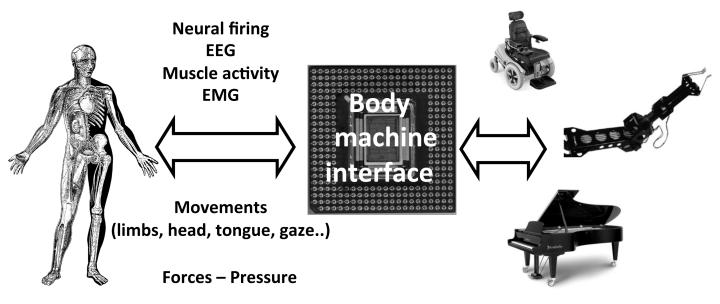
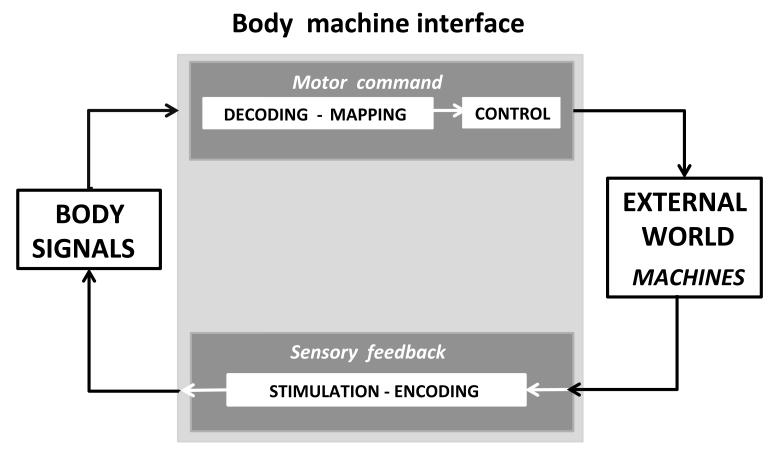
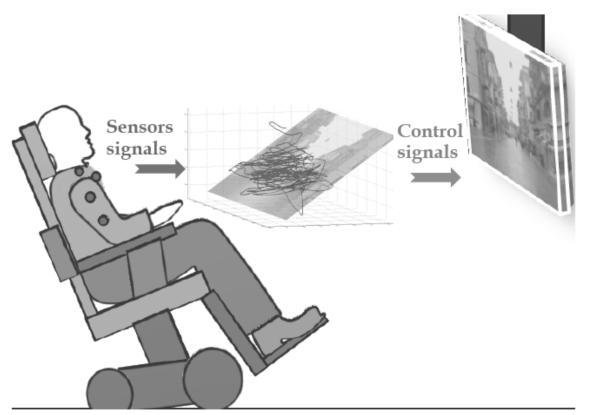
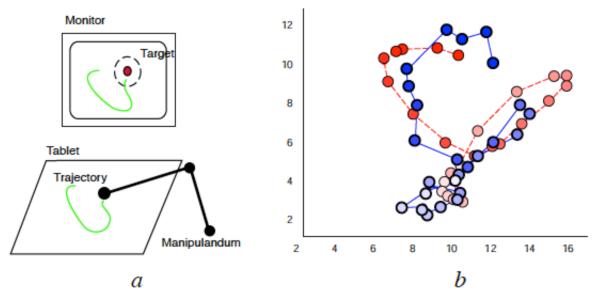
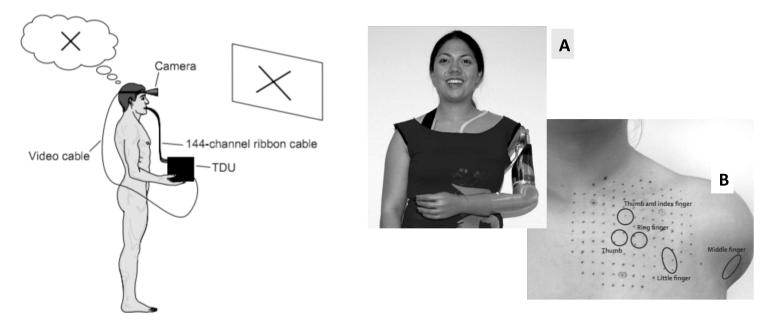
Body-machine interfaces establish a way to interact with a variety of devices, allowing their users to extend the limits of their performance. Recent advances in this field, ranging from computer interfaces to bionic limbs, have had important consequences for people with movement disorders. The authors provide an overview of the basic concepts underlying the body-machine interface with special emphasis on their use for rehabilitation and for operating assistive devices. They outline the steps involved in building such an interface and highlight the critical role of body-machine interfaces in addressing theoretical issues in motor control as well as their utility in movement rehabilitation.
人体-机器接口建立了一种与各种设备交互的方式,使用户能够突破自身能力的局限。该领域的最新进展,从计算机接口到仿生肢体,对患有运动障碍的人产生了重要影响。作者概述了人体-机器接口的基本概念,特别强调了其在康复和操作辅助设备方面的应用。他们概述了构建此类接口所涉及的步骤,并强调了人体-机器接口在解决运动控制理论问题方面的关键作用及其在运动康复中的效用。